Înțelesul cuvântului pitch. Pilotarea unui curs mare cu reacție
Secțiunea este foarte ușor de utilizat. În câmpul propus, introduceți doar cuvântul dorit și vă vom oferi o listă cu semnificațiile acestuia. Aș dori să remarc faptul că site-ul nostru oferă date din diverse surse - dicționare enciclopedice, explicative, de construire a cuvintelor. Aici vă puteți familiariza și cu exemple de utilizare a cuvântului pe care l-ați introdus.
Sensul cuvântului pitch
pitch în dicționarul de cuvinte încrucișate
Dicţionar enciclopedic, 1998
pas
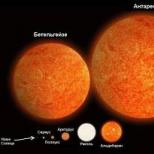
PITCH (tangage francez - tangaj) mișcarea unghiulară a unei aeronave sau a unei nave în raport cu axa transversală (orizontală).
Pas
(tangage francez ≈ tanaj), mișcarea unghiulară a unei aeronave sau a unei nave în raport cu axa transversală principală de inerție. Unghiul T. ≈ unghiul dintre axa longitudinală a aeronavei sau a navei și planul orizontal. În aviație, T. se distinge printr-o creștere a unghiului (cabrație) și cu o scădere a unghiului (dive); cauzate de devierea ascensorului.
Wikipedia
Pas
Pas- mișcarea unghiulară a aeronavei sau a navei în raport cu axa transversală principală de inerție. unghi de înclinare - unghiul dintre axa longitudinală a aeronavei sau a navei și planul orizontal. Unghiul de pas este notat cu litera θ. În aviație, există:
- pas pozitiv, cu unghi crescător - cablare , volanul spre tine;
- negativ, cu unghi descrescător - picaj , volanul departe de tine.
Cauzat de abaterea liftului.
Acesta este unul dintre cele trei unghiuri (rularea, pasși yaw), care stabilesc înclinarea aeronavei în raport cu centrul său de inerție de-a lungul a trei axe. În ceea ce privește vasele maritime, termenul „trim” este folosit cu același înțeles. Este de remarcat faptul că ornamentul are ideea opusă a pozitivității/negativității.
Exemple de utilizare a cuvântului pitch în literatură.
În plus, dacă păstrarea cursului se realizează practic fără prea multe dificultăți, atunci menținerea traseului de alunecare este asociată cu rezolvarea problemei complexe a echilibrării longitudinale a aeronavei în ceea ce privește viteza, modul de funcționare a motorului și pas, cu toate acestea, din cauza distragerii mai puține în selectarea și întreținerea cursului, această sarcină este mai ușor de rezolvat.
Dacă aceasta nu ține cont de viteza verticală, precum și de balansările asociate de obicei cu săriturile sale pas, apoi, cu menținerea formală a cursului și a traseului de alunecare, cu o viteză constantă indicată - cu toate acestea, în fața capătului de cap, este destul de posibilă o viteză verticală mare neconcepută, a cărei corecție corectează menținerea alunecării traseul, iar corectarea erorii de menținere a căii de alunecare se poate adăuga cu o viteză verticală deja neconcepută.
Pe măsură ce am acumulat experiența, mi-am dat seama că baza unei aterizări soft este respectarea strictă a cursului, ceea ce înseamnă eliberare. abilități de gândire pentru a analiza comportamentul mașinii de-a lungul canalului longitudinal: pas, cale de alunecare, împingere, viteză verticală.
Senzorii giroscopici sensibili preiau vibrațiile aeronavei în jurul a trei axe condiționate și dau semnale pentru abaterea anumitor cârme pentru a corecta ruliu; pas sau desigur.
În timp ce toate aceste manipulări au loc, fixez unghiul pe orizontul artificial pas, mă uit la viteză și la vario și cu coada ochiului observ că se sting luminile roșii ale alarmelor de șasiu.
În același timp, va fi foarte problematică accelerarea mașinii la o astfel de viteză la care să fie posibilă eliminarea modului motor din cel nominal, iar aeronava va reduce pas la tragere acceptabilă.
Aliniere foarte joasă și foarte ascuțită, cu o fixare clară a aterizării pas, se freacă de beton în mod inaudibil.
Decuplarea bruscă a pilotului automat cu o eroare acumulată a forțelor de rulare dezechilibrate și pas poate duce la o aruncare energică a aeronavei în direcţia direcţiei cârmelor eliberate.
Dacă creșterea vitezei pe verticală este asociată cu aspirația sub calea de alunecare, atunci săgeata director va urca viguros cu aceeași pasși cu aceeași viteză.
Această încredere este că vehiculul greu se apropie de beton cu o viteză verticală mică, oferind o aterizare moale și că scăderea acestei viteze verticale la nivelare este asigurată de o controlabilitate suficientă. pas.
La atingerea vitezei de 550, se stabilește o rată constantă de urcare, aeronava este tăiată în funcție de pas, iar apoi viteza indicată este menținută prin apăsarea ușoară a trimmerului.
Deci vdolbi, în plus, pentru student, că este mai bine să te spânzure și să te leagăn în laț decât să te leagăn pasîn fața pământului.
De îndată ce lamelele au fost îndepărtate, viteza a sărit peste 500, iar un alt set, cu o sută de pasageri în cabină, a fost efectuat întinși pe spate: pas 20 de grade, variometrul, derulând cercul cu săgeata, a blocat la 33.
Am scos spoilerele, am început din nou să echilibrez cu trimmerele: pas, rula.
Este decolarea pasși - cu coada ochiului - variometrul determină încetarea preluării cârmei.
CONSTRUIREA UNEI VERTICALE CU AJUTORUL PENDULUI FIZIC PE UN AVION
Când pilotați o aeronavă, este necesar să cunoașteți poziția acesteia față de planul orizontului pământului. Poziția aeronavei față de planul orizontului este determinată de două unghiuri: unghiul de înclinare și unghiul de rulare. Unghiul de pas - unghiul dintre axa longitudinală a aeronavei și planul orizontului, măsurat în plan vertical. Unghi de înclinare - unghiul de rotație al aeronavei în jurul axei sale longitudinale, măsurat dintr-un plan vertical care trece prin axa longitudinală a aeronavei
Fig. 4.1 pendul fizic - determinantul verticală pe plan.
Astfel, poziția aeronavei în raport cu planul orizontului poate fi determinată dacă direcția adevăratei verticale este cunoscută pe aeronavă, adică direcția liniei care trece prin centrul Pământului și a aeronavei și se măsoară abaterea aeronavei de la această direcție.
Abaterea de la verticala pe sol este determinată de un fir de plumb obișnuit, adică un pendul fizic.
Să presupunem că un pendul fizic este montat pe un avion care zboară orizontal cu accelerație A(Fig. 4.1). La masa pendulului T forțele vor acționa din accelerația gravitației gși forța de inerție din accelerație a. Suma momentelor din aceste forțe raportate la punctul de suspensie al pendulului este zero și se exprimă prin ecuație
Unde l- lungimea pendulului;
α - unghiul de deviere al pendulului
Din ecuația (4.1) avem
![]() (4.2)
(4.2)
În consecință, un pendul montat pe un obiect care se mișcă cu accelerație deviază în direcția opusă acțiunii accelerației și arată așa-numita „verticală aparentă”. Aeronavele moderne de transport pot avea accelerații proporționale ca mărime cu accelerația gravitației, astfel încât unghiul α de abatere al pendulului de la verticală poate atinge valori semnificative. Astfel, un pendul fizic nu este potrivit pentru determinarea direcției poziției verticale, adică pentru măsurarea unghiurilor de rostogolire și înclinare, dacă aeronava zboară cu accelerație.
AIRHOZONTURI
Mai devreme s-a observat că pendulul poate fi folosit pentru a determina verticala doar atunci când zboară fără accelerații, iar un giroscop liber de trei grade poate menține o anumită poziție spațială, indiferent de accelerațiile curente, doar pentru o perioadă scurtă de timp.
Prin urmare, aceste două dispozitive sunt conectate împreună, folosind proprietățile pozitive ale fiecăruia. În absența accelerațiilor folosind pendulul, axa principală a giroscopului este setată vertical. In acele momente in care acceleratiile actioneaza asupra pendulului, acesta este oprit si giroscopul functioneaza in modul „memorie”.

Dispozitivul prin care pendulul acționează asupra giroscopului se numește sistem de corecție a pendulului. Un giroscop cu o astfel de corecție se numește giroscop vertical. Giroscopul vertical, care arată vizual poziția aeronavei în raport cu orizontul pământului, se numește orizont artificial.
Orizonturile artificiale folosesc un pendul electrolitic (Fig. 4.2), care este un bol plat de cupru 3, umplut cu lichid conductiv 1 cu rezistivitate electrică ridicată. Este atât de mult lichid în vas încât este loc pentru o bulă de aer 2 . Vasul se inchide cu un capac din material izolant, in care sunt montate patru contacte. 4, al cincilea contact este cupa în sine. Dacă pendulul este situat orizontal, atunci toate cele patru contacte sunt suprapuse uniform de lichid, iar rezistența electrică a secțiunilor dintre ele și bol este aceeași. Dacă bolul se înclină, atunci bula de aer, care ocupă poziția superioară în bol, va expune unul dintre contacte și, prin urmare, va modifica rezistența electrică a secțiunii, care la unghiuri mici (până la 30 ") este proporțională cu unghiul de bolul.
 Contactele pendulului sunt incluse în circuit electric, după cum se arată în fig. 4.3. Când pendulul este înclinat, rezistența dintre pinii 0 și 1 va fi mai mare decât rezistența dintre pinii 0 și 3. Atunci curentul i 1 care trece prin înfășurarea de comandă OY 1, va fi mai puțin curent i 2 înfășurări OY 2 motor de corecție. Înfășurările OY 1 și OY 2 sunt înfășurate opus, deci diferența de curent Δ i=i 2 -i 1 creează un flux magnetic, care, interacționând cu fluxul magnetic al înfășurării câmpului, determină un cuplu. Rotorul motorului este fixat pe axa cardanului, prin urmare, se aplică un moment pe axa cardanului, sub acțiunea căruia precesează giroscopul. Precesia giroscopului continuă atâta timp cât există un moment de-a lungul axei cardanului, iar acest moment acționează până când pendulul este setat pe o poziție orizontală, la care curentul i 1 =i 2. Prin conectarea pendulului cu interiorul ,
cadrul suspensiei cardanice și așezând motoare de corecție de-a lungul axelor suspensiei, obținem un giroscop vertical cu corecție electromecanică pendulară (Fig. 4.4). Deci pendulul electrolitic 1
, acționând asupra giroscopului prin motoare de corecție 2
Și 3
, va aduce întotdeauna axa principală a giroscopului în poziție verticală. Când corecția este oprită, giroscopul își va păstra poziția anterioară în spațiu cu o precizie determinată de propriile erori, de exemplu, din cauza precesiei cauzate de momentele de frecare de-a lungul axelor cardanului.
Contactele pendulului sunt incluse în circuit electric, după cum se arată în fig. 4.3. Când pendulul este înclinat, rezistența dintre pinii 0 și 1 va fi mai mare decât rezistența dintre pinii 0 și 3. Atunci curentul i 1 care trece prin înfășurarea de comandă OY 1, va fi mai puțin curent i 2 înfășurări OY 2 motor de corecție. Înfășurările OY 1 și OY 2 sunt înfășurate opus, deci diferența de curent Δ i=i 2 -i 1 creează un flux magnetic, care, interacționând cu fluxul magnetic al înfășurării câmpului, determină un cuplu. Rotorul motorului este fixat pe axa cardanului, prin urmare, se aplică un moment pe axa cardanului, sub acțiunea căruia precesează giroscopul. Precesia giroscopului continuă atâta timp cât există un moment de-a lungul axei cardanului, iar acest moment acționează până când pendulul este setat pe o poziție orizontală, la care curentul i 1 =i 2. Prin conectarea pendulului cu interiorul ,
cadrul suspensiei cardanice și așezând motoare de corecție de-a lungul axelor suspensiei, obținem un giroscop vertical cu corecție electromecanică pendulară (Fig. 4.4). Deci pendulul electrolitic 1
, acționând asupra giroscopului prin motoare de corecție 2
Și 3
, va aduce întotdeauna axa principală a giroscopului în poziție verticală. Când corecția este oprită, giroscopul își va păstra poziția anterioară în spațiu cu o precizie determinată de propriile erori, de exemplu, din cauza precesiei cauzate de momentele de frecare de-a lungul axelor cardanului.
Sistemele de corecție diferă în ceea ce privește tipurile de caracteristici. Caracteristica de corecție este legea schimbării momentului dezvoltată de motorul de corecție, în funcție de abaterea axei principale a giroscopului de la poziția verticală.
În instrumentele de aviație, caracteristica de corecție mixtă a devenit cea mai răspândită (Fig. 4.5). Aria ±Δ α definește zona moartă a sistemului. Până la unele unghiuri extreme α etc,
β pr moment de corectare M k variază proporțional cu unghiurile α Și β și apoi devine constantă.
ERORI DE GIROVERTICALE
Eroarea din momentele de frecare in axele cardului si o v a p o dvesa. Momente de frecare există inevitabil în axele cardanelor, deci precesia giroscopului sub acțiunea momentelor de corecție continuă până când momentul de corecție este mai mare decât momentul de frecare. Mișcarea giroscopului se oprește atunci când aceste momente sunt egale:
De aici rezultă că axa principală a giroscopului nu va atinge poziția verticală în unghi α * Și β *:

Astfel, din cauza frecării în axele suspensiei cardanului, giroscopul vertical are o zonă de stagnare, care depinde de valoarea momentului de frecare în axele suspensiei de cardan și, în mod natural, de zona moartă a corecției pendulului ( vezi Fig. 4.5). Cu cât este mai mare momentul specific dezvoltat de motoarele de corecție, cu atât zona de stagnare este mai mică. Prea mult moment specific duce la erori semnificative la viraj. Pentru orizonturile artificiale, zona de stagnare este de obicei de 0,5-1°.
Eroare vizuală. Când avionul face o viraj cu o viteză unghiulară ω, atunci pe pendul, în plus față de gravitație mg, inca valid forța centrifugă mω 2 R, iar pendulul nu este așezat de-a lungul verticii adevărate, ci de-a lungul rezultantei acestor forțe (Fig. 4.7). Semnalele sunt trimise către motoarele de corecție, iar axa principală a giroscopului este setată pe poziția verticalei aparente. Acest proces este cu cât mai rapid, cu atât momentele specifice sunt mai mari k x, k y sisteme de corectare. După cum se poate observa din Fig. 3.10, sistemul de corecție laterală funcționează în general incorect la viraj. Prin urmare, în giro-verticalele moderne și în orizonturile artificiale, corecția transversală la viraj este oprită de un dispozitiv special.
Desigur, accelerația liniară a aeronavei, de exemplu, cu o creștere a vitezei, duce și la erori similare. Prin urmare, în astfel de orizonturi artificiale precum AGD-1, corecția longitudinală este, de asemenea, dezactivată. Când corecția este dezactivată, giroscopul vertical funcționează în modul „memorie”. După terminarea evoluției aeronavei asociate cu accelerații, sistemul de corecție se pornește și aduce axa principală a giroscopului în poziție verticală dacă acesta a deviat în timpul funcționării în modul „memorie”.
La giro-verticale apare o eroare atât din cauza rotației zilnice a Pământului, cât și din cauza vitezei de zbor proprii a aeronavei, însă pentru aeronavele de transport această eroare nu depășește câteva minute de arc.
va apărea un steag roșu 12. Acest comutator conectează înfășurările de control ale motorului de corecție transversală 4 cu faza C, ocolind rezistența R2, si prin aceasta creste

curent în motor și, în consecință, cuplul de corecție dezvoltat de acesta.
După ce dispozitivul ajunge la modul nominal de funcționare, comutatorul 10 ar trebui returnat la poziția inițială(steagul va dispărea din vedere). În modul nominal de funcționare, înfășurările de control ale motorului de corecție 4 conectat la faza C prin contactele comutatorului de corecție VK-53RB.
AVIAGORIZON AGI-1s
Indicatorul de atitudine este proiectat pentru a determina poziția aeronavei în spațiu față de linia orizontului real, are încorporat un dispozitiv indicator de alunecare. Orizontul artificial este instalat pe aeronavele de transport ale aviației civile.
Schema cinematică a dispozitivului este prezentată în fig. 4.8, electrică simplificată - în fig. 4.9, și o vedere a scalei - în fig. 4.10.

Luați în considerare funcționarea dispozitivului. Axa proprie de rotație a giroscopului (vezi Fig. 4.8) în funcție de semnalele de la pendulul electrolitic 8 cu motoare corectoare 3 Și 10 instalat și menținut în poziție verticală.
O caracteristică a orizontului artificial AGI-lc este capacitatea de a lucra într-o gamă nelimitată de unghiuri de rostogolire și înclinare. Acest lucru este posibil datorită utilizării unui cadru de urmărire suplimentar în dispozitiv. 4, a cărui axă coincide cu axa longitudinală a aeronavei, iar cadrul în sine poate fi rotit în raport cu aeronava de către motor 11 . Scopul cadrului de urmărire suplimentar este de a asigura perpendicularitatea axei de rotație proprie a giroscopului și a axei cadrului exterior al cardanelor. Când avionul se rostogolește, cadrul exterior 5 cardanul pivotează în jurul axei cadrului interior. Această rotație este fixată de un comutator 9 (vezi fig. 4.8 și 4.9), cu care motorul este pornit 11 , rotind cadrul urmăritor 4 , și odată cu el și cadrul 5 în sens invers. Prin urmare, perpendicularitatea axei proprii a giroscopului 6 iar axele cadrului exterior nu sunt încălcate. Când aeronava realizează evoluții de pas la unghiuri mai mari de 90˚, folosind comutatorul 12 se modifică sensul de rotație al motorului 11. De exemplu, dacă aeronava face figura „bucla lui Nesterov”, atunci în momentul în care se află într-o stare inversată, adică își schimbă poziția față de axa principală a giroscopului cu 180 °, direcția de rotație a motor 11 pentru a roti cadrul urmăritor trebuie inversat.
Când aeronava efectuează evoluție în pas, aeronava se rostogolește în jurul axei cadrului exterior al cardanelor și, prin urmare, are o rază de acțiune de 360°.
Indicarea poziției aeronavei în raport cu planul orizontului în AGI-1 se realizează în funcție de silueta aeronavei (vezi Fig. 4.8 și 4.10), montată pe corpul dispozitivului și scara sferică. 2, conectat cu axa cadrului interior 7 a suspensiei de cardan a giroscopului. scară sferică 2 colorat maro deasupra orizontului și albastru sub orizont. Pe câmpul maro se află inscripția „Coborâre”, pe cel albastru – „Urcare”. Astfel, la urcare, silueta aeronavei, împreună cu aeronava în sine, se va deplasa în câmpul albastru, așa cum se arată în Fig. 3.18, V, din moment ce scara 2, asociat giroscopului, va rămâne nemișcat în spațiu. Trebuie remarcat faptul că indicațiile indicatorului de atitudine AGI-lc în pas sunt opuse celor ale AGB-2. Acest lucru este extrem de important, deoarece ambele instrumente sunt uneori instalate pe aceeași aeronavă.

Figura 4.9 Schema electrică a orizontului artificial AGI-1.

Reducerea timpului de aliniere inițială a axei de rotație proprie a giroscopului la poziția verticală se realizează prin pornirea succesivă a înfășurărilor de excitație a motoarelor de corecție. 3 Și 10 cu înfășurări statorice ale motorului giroscop. În plus, există un pendul mecanic pe cadrul interior 7, care, atunci când dispozitivul nu este pornit, menține sistemul de cadru aproximativ la zero.
poziţie. In acelasi scop se foloseste un opritor mecanic, la apasarea butonului 15 care (vezi Fig. 4.10) cadrul suplimentar de urmărire este setat în poziţia zero. Pe buton există inscripția „Apăsați înainte de a începe”. Pentru a reduce eroarea de viraj a orizontului artificial, motorul de corecție transversală 3 pe o curbă este oprit de comutatorul de corecție VK-53RB. Pe partea frontală a dispozitivului, în partea de jos, există un indicator de alunecare 13 iar în stânga - mânerul 14 pentru a schimba poziția siluetei aeronavei.
AV-HORIZON AGD-1
Indicatorul de atitudine de la distanță AGD-1 oferă echipajului o indicație la scară largă ușor de perceput a poziției aeronavei în raport cu planul orizontului real și
 oferă consumatorilor (pilot automat, sistem de direcție, stații radar) semnale electrice proporționale cu abaterile de rulare și înclinare ale aeronavei.
oferă consumatorilor (pilot automat, sistem de direcție, stații radar) semnale electrice proporționale cu abaterile de rulare și înclinare ale aeronavei.
AGD-1 este format din două dispozitive: 1) un giroscop de trei grade cu corecție pendulară, numit senzor giroscop, care este instalat cât mai aproape de centrul de greutate al aeronavei; 2) semne amplasate pe tablourile de bord ale echipajului. La un senzor giroscop pot fi conectate până la trei indicatori.
Schema electromecanică principală a AGD-1 este prezentată în fig. 4.12, o vedere a scalei indicatorului este prezentată în fig. 4.13

Figura 4.13 partea frontală a orizontului artificial AGD-1.
Buton de prindere cu 36, lampă cu 37, alte denumiri sunt aceleași kA la 4.12.
Senzorul giroscop este un giroscop în trei trepte, a cărui axă a cadrului cardanului exterior este montată în cadrul urmăritor 7. Scopul cadrului urmăritor este de a asigura funcționarea dispozitivului într-o rolă într-o gamă nelimitată de unghiuri. . Cadrul urmăritor 7 asigură perpendicularitatea axei de rotație proprie a giroscopului față de axa cadrului extern al suspensiei cu ajutorul unui senzor de inducție
chika 3 și generator de motor 2, controlat cu amplificator 1 . Ancoră 5 senzorul este fixat pe axa cadrului interior și pe stator 3 legat rigid de cadrul exterior 8 suspensie cardanica.
Intrerupator 4 schimbă sensul de rotație al motorului 2, când aeronava efectuează modificări de pas cu unghiuri mai mari de 90°. Astfel, cadrul de urmărire 7 îndeplinește aceleași funcții ca și în orizontul artificial AGI-1s.
O caracteristică a sistemului de urmărire pentru testarea cadrului 7 în ruliu în indicatorul de atitudine AGD-1 este utilizarea unui amplificator bazat pe elemente semiconductoare și a unui motor-generator. Corecția pendulului AGD-1 este similară cu corecția AGI-lc și AGB-2, dar diferă prin faptul că motorul de corecție transversală 6 oprit nu numai de comutator 17, care este controlat de comutatorul de corecție VK-53RB, dar și de un dispozitiv lamelar special (neprezentat în diagramă) la role de 8-10 °. În plus, motorul de corecție longitudinală 10 controlat de un pendul electrolitic 13 prin accelerometru de fluid 16. Este un dispozitiv asemănător unui pendul lichid. În timpul accelerațiilor longitudinale ale aeronavei, fluidul conductiv se deplasează la unul dintre contacte sub acțiunea forțelor de inerție, iar din cauza creșterii rezistenței electrice a circuitului, corecția este slăbită cu 50%.
Abaterile de rulare și înclinare ale aeronavei sunt măsurate de un senzor giroscop și transmise indicatorului prin două sisteme de urmărire identice:
1) un sistem de urmărire a ruliului, care constă dintr-un senzor selsyn 9, receptor selsyn 20, amplificator 18 și generator de motor 19;
2) sistem de urmărire în pitch, care include: sincronizare-senzor 14, receptor sincron 23, amplificator 24, motor-generator 25.

Intrerupator 15 este inclus în sistemul de urmărire în pas pentru funcționarea sa corectă la un unghi mai mare de 90 °. O caracteristică a sistemelor de urmărire din AGD-1 este utilizarea generatoarelor de motoare ca dispozitive de acționare. Motorul-generator este o mașină electrică formată dintr-un motor și un generator montat pe un singur arbore. Tensiunea generată în generator este proporțională cu turația motorului. În sistemul servo, acesta servește ca semnal de feedback de mare viteză pentru amortizarea oscilațiilor sistemului. motor-generator 19 întoarce treapta de viteză 21 cu silueta unui avion 22 raportat la corpul dispozitivului și motorul-generator 25 rotește scala de înălțime 26,
având o culoare în două tonuri: deasupra orizontului - albastru, dedesubt - maro. Astfel, indicarea indicațiilor se realizează în funcție de silueta mobilă a aeronavei și scara de pas mobilă.
Indicarea poziției aeronavei față de planul orizontului în AGD-1 este naturală, adică corespunzătoare imaginii pe care echipajul și-o imaginează despre poziția aeronavei față de sol. O citire grosieră a rolului este posibilă pe o scară fixă digitalizată pe corpul instrumentului și pe silueta aeronavei; pe o scară 26 iar silueta aeronavei determină aproximativ unghiurile de înclinare. Indicația indicatorului AGD-1 pentru rostogolire și înclinare este prezentată în fig. 4.11. În opinia noastră, determinarea poziției aeronavei în AGD-1 este mai convenabilă decât în AGB-2 și AGI-1.
Orizontul artificial AGD-1 folosește un dispozitiv special numit descarcător, care vă permite să aduceți rapid cadrul dispozitivului și giromotorul într-o poziție strict definită în raport cu corpul dispozitivului și, în consecință, cu avionul. Schema cinematică a dispozitivului electromecanic de înghețare la distanță AGD-1 este prezentată în fig. 4.14.
Aparatul funcționează în felul următor. Prin apăsarea butonului roșu 36 (vezi Fig. 4.13), situat pe partea frontală a indicatorului, motorului i se aplică tensiune 34 (vezi Fig. 4.14. care, rotindu-se, face ca tija să se deplaseze înainte 33 folosind un deget care se deplasează de-a lungul fantei șurubului, adică piulița rotativă este staționară și șurubul se mișcă. Stoc 33 prin rolă 32 se sprijină pe un cadru suplimentar suplimentar 7, care are un inel în formă de pană 35.
Datorită acestui profil al inelului, atunci când se aplică presiune asupra cadrului din partea tijei, inelul 35 împreună cu unitatea giroscopică se rotește în jurul axei cadrului 7 până la rola 32 nu va fi în poziția inferioară a inelului. Planul cadrului 7 este paralel cu planul aripilor aeronavei. Următorul stoc 33 mută bara de profil 31, care se sprijină pe pumn 30 și creează un moment în jurul axei cadrului exterior 8. Sub acțiunea acestui moment, giroscopul precesează în jurul axei cadrului interior și ajunge la oprire, după care precesia se oprește, iar giroscopul începe să se rotească în jurul axei cadrului exterior până la proeminența barei. 31 nu se va potrivi în decupajul camei 30, fixând astfel cadrul 8 într-o poziție în care axa cadrului interior este paralelă cu axa longitudinală a aeronavei.
În același timp, degetul 28, sprijinindu-se pe came 27, instalează cadrul interior 12 într-o poziție în care axa de rotație proprie a giroscopului este perpendiculară pe axele cadrelor exterioare și interioare ale cardanelor. Apoi tulpina 33 sub acțiunea arcului de retur prezent în acesta, se înclină în poziția inițială și permite bara 31 eliberați camele 27 Și 30.
Astfel, opritorul, după ce a setat ramele nodului giroscop într-o anumită poziție, le eliberează imediat. Dacă înghețarea se efectuează la sol, când aeronava este la nivel, sau în zbor la nivel, atunci axa proprie de rotație a giroscopului este setată în direcția poziției verticale. Punerea în cușcă trebuie efectuată numai în zbor la nivel, deoarece inscripția de pe buton amintește echipajului 36 „Se încarcă în zbor la nivel”.
Dacă punerea în cușcă este efectuată, de exemplu, în timpul unei rostogoliri, atunci când treceți la zborul la nivel, indicatorul de atitudine va afișa o rulare falsă. Adevărat, sub acțiunea corecției pendulului, axa proprie a giroscopului va fi setată pe o poziție verticală și, firesc, citirile false vor dispărea, dar acest lucru va dura timp, suficient pentru ca echipajul să facă greșeli la pilotare. Trebuie remarcat faptul că circuitul electric de înșurubare este proiectat în așa fel încât atunci când AGD-1 este pornit, înlăturarea are loc automat, fără apăsarea unui buton. La reîncărcare, de exemplu, în cazul unei căderi temporare de curent a AGD-1, apăsând butonul 36 obligatoriu, dar numai în zbor la nivel.
Există o lampă de semnalizare pe partea din față a indicatorului 37 (vezi Fig. 4.13), care se aprinde, în primul rând, dacă are loc procesul de înghețare și, în al doilea rând, în cazul unor defecțiuni în circuitele de alimentare ale giromotorului și DC ±27 V.
AV-HORIZON AGB-3 (AGB-Zk)
Scopul principal al indicatorului de atitudine AGB-3 este de a oferi echipajului o indicație la scară largă, ușor de perceput, a poziției unei aeronave sau a elicopterului în ceea ce privește unghiurile de rulare și înclinare față de planul orizontului adevărat. În plus, orizontul artificial vă permite să emiteți semnale electrice proporționale cu unghiurile de ruliu și tanaj, consumatori externi disponibili în avion și elicopter (pilot automat, sistem de direcție etc.).

Indicatorul de atitudine AGB-Zk este o modificare a indicatorului de atitudine AGB-3. diferă numai prin prezența fitingurilor încorporate de iluminare roșie pentru a ilumina partea frontală a dispozitivului și culoarea elementelor: indicație.
Schema electromecanică a orizontului artificial AGB-3 este prezentată în fig. 4.15, circuit electric - în fig. 4.16, și o vedere a scalei sale - în fig. 4.17. Axa proprie a giroscopului este adusă în poziție verticală printr-un sistem de corecție cu pendul, care include două pendule electrolitice 20 Și 21, controlul motoarelor de corecție 7 și 9. AGB-3 utilizează o singură coordonată: pendulele electrolitice care funcționează pe același principiu ca două coordonate, care sunt utilizate în AGB-2, AGI-lc și AGD-1. Un pendul cu o singură axă are trei contacte și răspunde doar la înclinări într-o singură direcție. Există un contact în circuitul de corecție transversală 16 comutator de corecție VK-53RB, care întrerupe circuitul atunci când aeronava face viraj, reducând eroarea de viraj.

Timpul în care dispozitivul este pregătit să lucreze în orizontul artificial este redus printr-un blocaj mecanic (nu este prezentat în Fig. 4.15). Dacă aeronava se află într-o poziție orizontală, atunci opritorul setează cadrul unității giroscopice în starea sa inițială, în care axa principală a giroscopului coincide cu poziția verticală. Descărcătorul este utilizat înainte de pornirea dispozitivului, atunci când dintr-un motiv sau altul este necesară aducerea rapidă a cadrului dispozitivului în poziția inițială. Descărcătorul din AGB-3 este de tip împingere, adică pentru funcționarea acestuia este necesar să apăsați butonul 26 (vezi Fig. 4.17) la eșec. Cadrele sunt eliberate automat din cușcă atunci când butonul este eliberat.
Funcționarea dispozitivului de oprire este similară cu funcționarea opritorului în orizontul artificial AGD-1. Orizontul artificial AGB-3 are un opritor mecanic.
Pentru a furniza consumatorilor semnale de abatere a aeronavei în ruliu și înclinare, un senzor selsyn este instalat pe axa cadrului exterior al cardanelor. 14 (vezi Fig. 4.15, 4.16), iar pe axa cadrului interior - senzorul selsyn 15.
Pe o aeronavă, indicatorul de atitudine este setat astfel încât axa
cadru exterior 8
(vezi Fig. 4.15) este îndreptată paralel cu axa longitudinală a aeronavei. Acest lucru asigură funcționarea dispozitivului într-o rolă în intervalul de unghiuri de 360°.

Axa cadrului interior al cardanelor este paralelă la momentul inițial cu axa transversală a aeronavei. Din moment ce suplimentare
Nu există un cadru de urmărire în AGB-3, ca în AGI-lc și AGD-1, atunci domeniul de operare în pas în această atitudine este limitat la unghiuri de ±80°. Într-adevăr, dacă aeronava are un unghi de înclinare de 90°, atunci axa cadrului exterior va fi aliniată cu axa de rotație proprie a giroscopului. Giroscopul, după ce a pierdut un grad de libertate, devine instabil. Cu toate acestea, pentru a oferi echipajului o indicație corectă a poziției aeronavei în raport cu planul orizontului într-o stare inversată (de exemplu, atunci când se efectuează figura „bucla lui Nesterov”), opririle sunt utilizate în dispozitiv. 10 Și 11 (vezi figura 4.15). Când se efectuează evoluții complexe cu o aeronavă cu un unghi de înclinare mai mare de 80 °, oprirea 10, situat pe cadrul exterior, va începe să exercite presiune asupra opritorului 11, fixat pe axa cadrului interior. Acest lucru creează un moment în jurul axei cadrului interior. Conform legii precesiunii, giroscopul precesează sub acțiunea acestui moment, adică se rotește în jurul axei cadrului exterior, încercând să alinieze axa propriei rotații cu axa de aplicare a momentului pe cea mai scurtă distanță. Astfel, cadrul exterior este cardan sub. greutatea se rotește la 180°. Când unghiul de înclinare este peste 90°, oprirea 11 scapă de cârlig 10, precesia se va opri, iar silueta aeronavei 4 va fi inversat cu 180° față de scala de pas 3, care va indica poziţia inversată a aeronavei cu 180 faţă de planul orizontului.

Indicarea poziției aeronavei în raport cu planul orizontului în AGB-3 se realizează după cum urmează. În timpul rulării, corpul dispozitivului, împreună cu aeronava, se rotește în jurul axei cadrului exterior printr-un unghi de rulare, deoarece propria axă de rotație a giroscopului menține o direcție verticală. Siluetă de avion 4 în același timp, participă la două mișcări: 1) portabil - împreună cu corpul dispozitivului la un unghi de rulare la(Fig. 4.18) și 2) rotațional (trib 6 se rostogolește în jurul tribka fixată în rola 5) în același unghi Y- Ca urmare a acestor două mișcări, silueta aeronavei în spațiu se rotește cu un unghi dublu al ruliui aeronavei. Echipajul, pe de altă parte, observă unghiul de rulare prin mișcarea siluetei aeronavei 4 raportat la scară 3. În acest caz, silueta se întoarce într-un unghi natural de înclinare în aceeași direcție cu aeronava.
Citirea brută a unghiurilor de rulare poate fi făcută pe o scară 27 pe corpul dispozitivului și unghiurile de pas - pe scară 3 și silueta avionului 4. Scala de pas urmărește unghiurile de pas ale aeronavei datorită unui sistem de urmărire care include o sincronizare. 15, situat pe axa internă a cardanelor, receptor selsyn 19, amplificator 17 și generator de motor 18. În slotul scării 3 trece o axă pe care este fixată silueta aeronavei.
Astfel, citirile de rostogolire și înclinare din AGB-3 sunt naturale și identice cu cele ale AGD-1 (vezi Fig. 4.11).
AGB-3 are un circuit de semnalizare a unei defecțiuni în circuitele de alimentare ale dispozitivului, care conține următoarele elemente: motor de întrerupere de curent 1 cu un steag 2 (vezi fig. 4.15 și 4.16) și două relee 22 Și 23. Înfășurările motorului 1 conectat în serie cu înfășurările statorului giroscopului 13. Cu circuite AC funcționale de 36 V, curenții giromotorului și ai senzorilor selsyn curg prin înfășurările motorului 14 Și 15.
Ca rezultat, se generează un cuplu pe arborele motorului 1, sub influenţa căreia steagul 2 dispozitivul de semnalizare montat pe arborele motorului este îndepărtat din zona vizibilă a părții frontale a dispozitivului.
Dacă nu există tensiune alternativă în circuitul de alimentare al motorului giroscopului sau are loc o defecțiune a fazei, atunci cuplul motorului scade brusc și, sub influența unui arc, steagul este aruncat în zona vizibilă a părții frontale a dispozitivului. .
Releu 22 Și 23 sunt conectate în paralel cu circuitul de alimentare al amplificatorului sistemului de urmărire a pasului. În absența tensiunii de 27 V DC, contactele 24 Și 25 aceste relee se închid, manevrând două faze ale înfășurărilor motorului 1, prin urmare, cuplul acestuia scade, iar arcul aruncă steag 2, ceea ce indică o pană de curent.
Astfel, o întrerupere într-un circuit cu o tensiune de 36 V, o frecvență de 400 Hz sau într-un circuit cu o tensiune de 27 V, precum și absența unuia dintre aceste tipuri de alimentare, pot fi determinate de prezența a unui steag de semnalizare în câmpul vizual al scalei instrumentului.
AVIAGORIZON AGK-47B
Indicatorul de atitudine este combinat, deoarece trei dispozitive sunt montate într-o singură carcasă: un indicator de atitudine, un indicator de direcție și un indicator de alunecare.
Scopul orizontului artificial este de a oferi echipajului informații despre poziția aeronavei față de planul orizontului. Indicatorul de viraj este folosit pentru a determina direcția de viraj a aeronavei, iar indicatorul de alunecare măsoară alunecarea. Indicatorul de direcție este discutat în sec. 4.2, iar indicatorul de alunecare - în sec. 3.11. Schemele cinematice simplificate, electrice și partea din față a indicatorului de atitudine sunt prezentate în fig. 4,19, 4,20, 4,21; Toate denumirile din figuri sunt aceleași.

Axa proprie de rotație a giroscopului 7 (vezi Fig. 4.19, 4.20) este adusă în poziție verticală cu ajutorul unui sistem de corecție a pendulului, care include un pendul electrolitic, / 6 și doi solenoizi 13 Și 14, Solenoid 13 situat perpendicular pe axa exterioară la cardanele și solenoidul 14 - perpendicular pe axa interioara X cardanele pe cadrul interior 6, realizată sub formă de carcasă. Fiecare dintre solenoizi are două înfășurări, care, atunci când curenții trec prin ele, creează câmpuri magnetice în direcția opusă. Solenoizii au miezuri metalice care au capacitatea de a se mișca în interiorul solenoizilor. Dacă axa proprie de rotație a giroscopului coincide cu direcția verticală locală, atunci pendulul electrolitic primește aceleași semnale de la pendulul electrolitic către înfășurările solenoizilor și miezurile, fiind în poziția de mijloc, nu creează momente. în jurul axelor cardanelor. Dacă axa principală a giroscopului se abate de la direcția verticală, curenții care curg prin înfășurările solenoizilor nu vor fi egali din cauza rezistențelor inegale dintre contactele pendulului electrolitic. Acest lucru va duce la mișcarea miezurilor în solenoizi și, datorită greutății lor în jurul axelor cardanului, vor apărea momente care vor readuce axa de rotație a giroscopului în poziție verticală. Deci solenoid 14 participă la crearea unui moment în jurul axei interne a cardanului și a solenoidului 13 - în jurul axei exterioare a suspensiei.

Axa exterioară a cardanului orizontului artificial este paralelă cu axa transversală a aeronavei, astfel încât indicarea pasului se realizează pe o scară circulară 4, asociat cu cadrul exterior al cardanelor 5 și linia orizontului asociată cu corpul dispozitivului. La scufundare sau înclinare, linia orizontului se mișcă în raport cu o scară fixă - imaginea îi apare pilotului în sens invers: silueta aeronavei 1 împreună cu scara 4 coboară sau se ridică în raport cu linia orizontului. Indicarea ruliului se realizează în funcție de poziția relativă a siluetei aeronavei /, conectată cu cadrul intern al cardanelor și scara 3, montat pe cadrul exterior al cardanelor. Pentru ca indicația ruliului să fie naturală, adică silueta aeronavei a imitat o rulare în raport cu planul orizontului, la fel ca în AGB-3, a fost folosită o pereche de viteze cu un raport de transmisie de 1:1 în AGK.-47B. Scara de pas este digitizată la 20°, iar scara de ruliu este marcată la 15°. Indicația de rulare și înclinare a AGK-47B în timpul evoluțiilor aeronavei este prezentată în fig. 4.11.

Orizontul artificial are un descărcător mecanic de tip fix, adică dacă în AGB-3 și AGD-1 descărcătorul funcționează doar la apăsarea butonului, atunci în AGK-47B este posibil prin extinderea tijei descărcătorului 20 (Fig. 4.21) spre tine, fixați-l în această poziție. Când dispozitivul este blocat, pe partea frontală a dispozitivului apare un steag roșu cu inscripția „Clamped”. Când dispozitivul este blocat, axa de rotație proprie a giroscopului coincide cu axa verticală a aeronavei, iar axele lași x coincid, respectiv, cu axele longitudinale și transversale ale aeronavei. Pe mânerul de comandă al descărcătorului este scris „Tragere descărcător”.
Cu ajutorul unui cremal 22 este posibil să se schimbe într-o oarecare măsură poziția liniei orizontului artificial față de corpul dispozitivului, ceea ce uneori este recomandabil să se facă pentru comoditatea menținerii traiectoriei de zbor în pas, în timpul unui zbor lung neorizontal.
Ca orice orizont artificial, AGK-47B este supus unei erori de viraj, dar datorită faptului că este destinat instalării pe aeronave ușoare, unde este posibil să nu existe un comutator de corecție, corecția nu este dezactivată în acesta. În același timp, pentru a reduce eroarea în timpul unui viraj la stânga, dispozitivul este proiectat în așa fel încât poziția normală a axei propriei rotații să fie poziția sa înclinată înainte, de-a lungul zborului, cu 2°. Scăderea erorii în mod specific pentru virajul la stânga poate fi explicată probabil prin faptul că aeronavele fac mai des viraj la stânga, deoarece comandantul aeronavei stă în cabina de pilotaj pe scaunul din stânga. Într-adevăr, cu o îndoire la stânga, pendulul electrolitic va prezenta o verticală aparentă, care deviază în interiorul curbei cu un unghi.
unde ω este viteza unghiulară a virajului; V- viteza de zbor a aeronavei; g- accelerarea gravitației.
Sub acțiunea sistemului de corecție transversală folosind un solenoid 13 giroscopul va începe să preceseze spre verticala aparentă cu o viteză

În același timp, la întoarcere, capătul propriei axe de rotație a giroscopului se va întoarce în jurul poziției verticalei adevărate cu o viteză.
![]() (4.5)
(4.5)
unde α 0 este unghiul inițial de înclinare a axei de rotație a giroscopului în față (Fig. 4.22), îndreptată în sens opus, întrucât giroscopul urmărește să mențină neschimbată poziția propriei axe de rotație a giroscopului în spațiu. Direcția vitezei ω γ este opusă direcției vitezei de precesie a giroscopului β.

Evident, pentru a nu exista nicio eroare în timpul cotirii la stânga, condiția trebuie îndeplinită
sau pentru unghiuri mici β 0 (4.6) se poate scrie
![]() (4.7)
(4.7)
![]() (4.8)
(4.8)
știind K y orizontul artificial și cele mai frecvente viteze la care are loc virajul, se poate determina unghiul necesar α 0 de înclinare a axei giroscopului.
AV-HORIZON AGR-144
Indicatorul de atitudine AGR-144 este un instrument combinat; În el sunt montate trei instrumente: un indicator de atitudine, un indicator de direcție și un indicator de alunecare.
Scopul orizontului artificial este de a oferi echipajului informații despre poziția aeronavei în raport cu planul orizontului.Indicatorul de direcție este folosit pentru a determina prezența și direcția virajului aeronavei în jurul axei sale verticale. Indicatorul de alunecare măsoară alunecarea aeronavei. În plus, atunci când sunt coordonate
tangage- tanaj) - mișcarea unghiulară a unei aeronave sau a unei nave în raport cu axa transversală principală (orizontală) de inerție. unghi de înclinare - unghiul dintre axa longitudinală a aeronavei sau a navei și planul orizontal. Unghiul de pas este notat cu litera θ (theta). În aviație, există:- pas pozitiv, cu unghi crescător (nasul în sus) - cablare , volanul spre tine;
- negativ, cu o scădere a unghiului (coborârea nasului) - picaj , volanul departe de tine.
Acesta este unul dintre cele trei unghiuri (rularea, pasși yaw), care stabilesc înclinarea aeronavei în raport cu centrul său de inerție de-a lungul a trei axe. În ceea ce privește navele, termenul „trim” este folosit cu același sens. Este de remarcat faptul că ornamentul are ideea opusă a pozitivității/negativității.
Vezi si
Scrieți o recenzie la articolul „Pitch”
Note
Legături
- Catalog Aerobatic Aresti FAI = Catalogue Aerobatic FAI Aresti. - Federația Aeronautică Internațională, 2002.
Un fragment care caracterizează pitch-ul
„O, Doamne, oamenii sunt ca o fiară, unde pot fi cei vii!” s-a auzit în mulțime. „Și omul e tânăr... trebuie să fie de la negustori, apoi de la oameni! .. se zice, nu ăla... cum nu ăla... Doamne... Altul a fost bătut, se spune. , un pic viu... Eh, oameni... Cine nu se teme de păcat... – spuneau acum aceiași oameni, cu o expresie dureros de jalnic, privind cadavrul cu fața albastră, mânjită cu sânge și praf si cu gatul lung si subtire tocat.Un ofițer de poliție sârguincios, constatând prezența unui cadavru în curtea Excelenței Sale indecentă, le-a ordonat dragonilor să tragă cadavrul în stradă. Doi dragoni au apucat picioarele mutilate și au târât trupul. Un cap însângerat, pătat de praf, mort, ras pe un gât lung, strâns în sus, târât de-a lungul pământului. Oamenii s-au ghemuit departe de cadavru.
În timp ce Vereșchagin cădea și mulțimea, cu un vuiet sălbatic, șovăia și se legăna peste el, Rostopchin s-a făcut deodată palid și, în loc să se ducă pe veranda din spate, unde îl așteptau caii, el, neștiind unde și de ce, și-a coborât. cap, cu pași repezi parcurgea coridorul care ducea la camerele de la parter. Fața contelui era palidă și nu-și putea opri maxilarul inferior să tremure ca de febră.
„Excelența voastră, pe aici... unde ați vrea?... pe aici, vă rog”, spuse vocea lui tremurândă și înspăimântată din spate. Contele Rostopchin nu a putut să răspundă nimic și, întorcându-se ascultător, s-a dus unde i se îndrepta. Pe veranda din spate era o trăsură. S-a auzit și aici bubuitul îndepărtat al mulțimii hohote. Contele Rostopchin se urcă grăbit în trăsură și porunci să meargă la casa lui de la țară din Sokolniki. După ce a plecat la Myasnitskaya și nu a mai auzit strigătele mulțimii, contele a început să se pocăiască. Acum își amintea cu neplăcere de entuziasmul și teama pe care le manifestase subordonaților săi. „La populace est terrible, elle est hideuse”, gândi el în franceză. - Ils sont sosh les loups qu "on ne peut apaiser qu" avec de la chair. [Mulțimea este îngrozitoare, este dezgustătoare. Sunt ca lupii: nu-i poti satura cu altceva decat carne.] „Numara! un singur zeu este deasupra noastră!” – și-a amintit brusc de cuvintele lui Vereșchagin și o senzație neplăcută de frig a trecut pe spatele contelui Rostopchin. Dar acest sentiment a fost instantaneu și contele Rostopchin a zâmbit disprețuitor asupra sa. „J” avais d „autres devoirs”, gândi el. – Il fallait apaiser le peuple. Bien d "autres victimes ont peri et perissent pour le bien publique“, [Aveam alte îndatoriri. Trebuia să mulțumesc oamenii. Multe alte victime au murit și mor pentru binele public.] - și a început să se gândească la generalul. îndatoririle pe care le avea în relație cu familia sa, capitalul său (încredințat lui) și el însuși - nu ca Fiodor Vasilevici Rostopchin (el credea că Fiodor Vasilevici Rostopchin se sacrifică pentru bien public [bunul public]), ci despre el însuși ca comandant. în șef, despre „Dacă aș fi fost doar Fyodor Vasilyevich, ma ligne de conduite aurait ete tout autrement tracee, [calea mea ar fi fost trasă într-un mod complet diferit], dar a trebuit să salvez atât viața, cât și demnitatea comandantului în şef."
Forțe dinamice de bază
Un salt este un concept complex: rezultatul interacțiunii a două sau mai multe variabile, funcționarea legilor fizicii și ale omului. Pentru a înțelege cum are loc o astfel de interacțiune, este necesar să luăm în considerare fiecare cantitate separat.
„Magnet sub masă”
Dacă aș împrăștia pilitură de metal pe masă, probabil m-ați privi surprins. Dar dacă aș pune un magnet sub suprafața mesei și aș începe să-l mișc, ai crede că sunt un magician. Desigur, aici nu sunt miracole. Aceasta este o operație simplă a legilor fizicii. Realitatea evidentă este mișcarea piliturii metalice pe suprafața mesei fără niciun motiv aparent. De fapt, magnetul acționează asupra rumegușului așa cum ar trebui să acționeze fără nicio interferență din partea forțelor de altă lume. Aproximativ același lucru se întâmplă cu zborul. Până când ne vom ocupa de forțele dinamice de bază, vom presupune că se întâmplă un fel de miracol. Pentru a învăța să zbori, trebuie să înțelegi cum funcționează aceste forțe.
Este necesar să învățați să înțelegeți situația în ansamblu. Luați, de exemplu, păsările. Nu sunt considerați cei mai deștepți din lume. Nici măcar nu au fost la grădiniță, cu toate acestea, au o înțelegere cuprinzătoare a principiilor de bază ale zborului, ceea ce le permite să zboare în siguranță și mai grațios decât o face o persoană. Poate ne gândim prea mult? Cu toate acestea, o persoană poate zbura. Putem învăța să facem față situațiilor și relațiilor. Înțelegerea noastră rațională a principiilor zborului este cea care o face posibilă. Nu vom ajunge niciodată acolo unde gândurile noastre nu au fost încă. Când te-ai gândit și ai analizat totul, înțelegi că există un număr imens de detalii care controlează un corp zburător. Trebuie să studiem fiecare componentă a săriturii, să o privim la microscop pentru a înțelege cum se formează un întreg din părți separate. Îmi propun să încep prin a învăța limba zborului.
Limbajul spațial
Variat variabile legate de zbor necesită clarificare (definiție) a ceea ce se poate face cu limbajul. Un astfel de limbaj este foarte specific aviației, unde cuvintele obișnuite și familiare capătă un sens diferit în funcție de situația specifică.
Se rostogolește, se înclină și se rotește
Orientarea sau locația trebuie înțeleasă numai în raport cu ceva. Acest „ceva” este corpul ceresc cel mai apropiat de noi, adică Pământul. Când începem să parașutăm pe alte corpuri cerești cu o gravitație mai mică decât pământul, ne vom determina poziția în raport cu cele mai apropiate planete. Sistemul pe care îl folosim pentru a ne determina poziția necesită construirea a trei axe de orientare. Să ne simplificăm sarcina luând corpul uman drept corp zburător. Dacă îți întinzi brațele în lateral, brațele tale vor reprezenta „Axa Pitch”. În afara axei poate fi demonstrată prin înclinarea corpului înainte și înapoi. „Axa de rulare” este stâlpul care trece prin pieptul tău. Abaterea de la această axă va fi pante către laturi. A treia axă este „Axa de rotire” (axa de rotație în plan orizontal în jurul axei verticale). Poate fi considerat ca un stâlp care vă străbate corpul din cap până în picioare. Abaterea de la această axă va fi o piruetă de viraj la dreapta sau la stânga.
Să verificăm corectitudinea înțelegerii tale a acestor termeni cu exemple specifice. Imaginează-ți că ești un avion care zboară la o anumită altitudine. Dacă vi se cere să vă abateți de la axa de pas în jos, veți forța avionul să cadă nasul. Creșterea axei te va forța să ridici nasul în sus în raport cu coada. Dacă trebuie să rotiți spre dreapta, coborâți aripa dreaptă și ridicați stânga. „Yaw” la dreapta ar fi o simplă întoarcere la dreapta în plan orizontal.
Atenţie! Acest site nu este actualizat. Versiune nouă: shatalov.su
Transformări: Ultima rezistență
Data creării: 20-10-2009 03:43:37
Ultima modificare: 08-02-2012 09:36:52
- Lecții preliminare:
- Trigonometrie. Merge.
- Vectori. Merge.
- Matrici. Merge.
- spații de coordonate. Merge.
- Transformări ale spațiilor de coordonate. Merge.
- proiecție în perspectivă. Merge.
Ceva de care nu ne-am amintit de multă vreme despre transformări! Probabil, dragul meu cititor, ți-ai ratat deja? După cum arată practica, transformările sunt subiectul cel mai preferat pentru cei care studiază programarea tridimensională.
În acest moment, ar trebui să fii deja versat în transformări.
45. Principiul de funcționare a canalelor de rostogolire, înclinare și rotire ale pilotului automat.
Dacă nu, atunci uită-te la lecțiile preliminare.
Când tocmai începeam să studiem transformările, am scris că, cu ajutorul matricelor, poți manipula obiecte din spațiu: mișcă, rotește, crește. Dacă ați studiat toate lecțiile anterioare și ați încercat să aplicați cunoștințele dobândite în practică, atunci cel mai probabil ați avut de înfruntat anumite dificultăți: cum să mutați obiectele într-o direcție arbitrară, cum să faceți o matrice pentru convertirea în spațiul camerei, cum să rotiți obiectele într-o direcție arbitrară?
Vom lua în considerare aceste probleme astăzi.
Mișcarea în spațiu
O mică notă: spațiul mondial al coordonatelor pe care îl vom desemna axele x,y,z. Vectorii de bază care formează spațiul local (obiect, cameră) vor fi notați ca i=(1,0,0), j=(0,1,0), k=(0,0,1) (numele vectorilor se citesc ca: Și, zhi, ka). Vector i este paralel cu axa x, vector j— axele y, vector k- axa z.
Vă reamintesc că cu combinație liniară(sume) vectorilor de bază pot fi exprimate prin orice vector al spațiului. De asemenea, nu uitați că lungimea vectorilor de bază este egală cu unu.
Acum să ne uităm la imagine:

Pentru simplitate, am renunțat la o dimensiune - verticală. În consecință, imaginile arată o vedere de sus.
Să presupunem că suntem la un moment dat în spațiul mondial. În acest caz, pronumele „noi” poate însemna orice: un obiect din lumea jocului, un personaj, o cameră. În acest caz ( fig.a) privim spre punct A. De unde știm că „privirea” este îndreptată spre punct A? Ei bine, când am discutat despre camere, am fost de acord că vectorul k indică direcția de vedere.
Suntem separați de centrul lumii (spațiul de coordonate mondial) prin vector v. Si dintr-o data! Ne-am dorit teribil să ne apropiem de subiect A. Primul gând: eliminați valoarea (dz) din săgeata „înainte” și adăugați-o la a treia componentă a vectorului v. Rezultatul acestei neînțelegeri poate fi văzut în fig.b. S-ar părea că totul a dispărut - la revedere visele la propriul tău cutremur. Opreste panica! Trebuie doar să luați în considerare cu atenție situația actuală.
Imaginează-ți că suntem deja la subiect A- uita-te la fig.c. După cum se vede din figură, după mutarea vectorilor kȘi i neschimbat. În consecință, nu le vom atinge.
Privind restul imaginii: vector v după mutare este suma a doi vectori: vectorul vînainte de deplasare și vectorul necunoscut nouă, care coincide în direcție cu vectorul k… Dar acum putem găsi cu ușurință un vector necunoscut!
Dacă ați studiat cu atenție lecția despre vectori, atunci vă amintiți că înmulțirea unui scalar cu un vector crește (dacă scalarul este mai mare de unu) vectorul. Prin urmare, vectorul necunoscut este k*dz. În consecință, vectorul v după mutare poate fi găsită prin formula:
Ei bine, nu este simplu?
Rotația în jurul axelor
Cunoaștem deja formulele de rotație în jurul axelor. În această secțiune, le voi explica pur și simplu mai clar. Luați în considerare rotația a doi vectori în jurul centrului coordonatelor în spațiul bidimensional.

Deoarece cunoaștem unghiul de rotație (unghiul alfa), atunci coordonatele vectorilor de bază ai spațiului pot fi calculate cu ușurință folosind funcții trigonometrice:
i.x = cos(a); i.z = sin(a); k.x = -sin(a); k.y = cos(a);
Acum să ne uităm la matricele de rotație în jurul axelor în spațiul tridimensional și la ilustrațiile corespunzătoare.
Rotația în jurul axei x:

Rotația în jurul axei y:

Rotația în jurul axei z:

Figurile arată exact ce vectori își schimbă coordonatele.
O mică notă: este greșit să vorbim despre rotație în jurul axelor. Rotația are loc în jurul vectorilor. Nu știm să reprezentăm linii drepte (axe) în memoria computerului. Dar vectorii sunt ușori.
Și încă ceva: cum se determină unghiul de rotație pozitiv și negativ? Este ușor: trebuie să „stai” în centrul coordonatelor și să privești spre direcția pozitivă a axei (linie dreaptă). Rotirea în sens invers acelor de ceasornic este pozitivă, rotația în sensul acelor de ceasornic este negativă. În consecință, în figurile de mai sus, unghiurile de rotație în jurul x și y sunt negative, iar unghiul de rotație în jurul axei z este pozitiv.
Rotire în jurul unei linii arbitrare
Imaginați-vă această situație: rotiți camera cu o matrice în jurul axei x (înclinați camera) cu douăzeci de grade. Acum trebuie să rotiți camera cu douăzeci de grade în jurul axei y. Da, nicio problemă, zici... Stop! Și în jurul a ce aveți nevoie acum pentru a roti obiectul? În jurul axei y care a fost înainte de rotația anterioară sau după? La urma urmei, acestea sunt două axe complet diferite. Dacă pur și simplu creați două matrice de rotație (în jurul axei x și în jurul axei y) și le înmulțiți, a doua rotație va fi în jurul axei y originale. Dar dacă avem nevoie de a doua opțiune? În acest caz, va trebui să învățăm cum să rotim obiectele în jurul unei linii drepte arbitrare. Dar mai întâi, un mic test:
Câți vectori sunt în imaginea următoare?

Răspunsul corect este trei vectori. Amintiți-vă: vectorii sunt lungimea și direcția. Dacă doi vectori din spațiu au aceeași lungime și direcție, dar sunt localizați în locuri diferite, atunci putem presupune că acesta este același vector. În plus, în figură, am descris suma vectorilor. Vector v = v 1 + v 2 .
În lecția despre vectori, ne-am uitat pe scurt la produsul scalar și încrucișat al vectorilor. Din păcate, nu am studiat acest subiect mai detaliat. Formula de mai jos va folosi atât produsul punct cât și produsul încrucișat. Prin urmare, doar câteva cuvinte: valoarea produsului scalar este proiecția primului vector pe al doilea. Cu un produs vectorial al doi vectori: A X b = c, vector c perpendicular pe vectori AȘi b.
Ne uităm la următoarea figură: un vector este definit în spațiu v. Și acest vector trebuie rotit în jurul liniei drepte l (el):

Nu știm să reprezentăm linii în programe. Prin urmare, reprezentăm linia ca un vector unitar n, care coincide în direcția cu dreapta l (el). Să ne uităm la o imagine mai detaliată:

Ce avem:
1. Linia l reprezentată printr-un vector de unitate de lungime n. După cum sa menționat mai sus, rotația vectorului v va fi efectuată în jurul unui vector, nu a unei linii drepte.
2. Vector v, pentru a fi rotit în jurul vectorului n. Ca rezultat al rotației, ar trebui să obținem un vector u(citește ca la).
3. Unghiul cu care vectorul trebuie rotit v.
Cunoscând aceste trei mărimi, trebuie să exprimăm vectorul u.
Vector v poate fi reprezentat ca suma a doi vectori: v = v ⊥ + v|| . În acest caz, vectorul v || - paralel cu vectorul n(puteți spune chiar: v || este o proiecție v pe n), și vectorul v⊥ perpendiculară n. După cum ați putea ghici, trebuie să vă rotiți doar perpendicular pe vector n parte a vectorului v. Acesta este - v ⊥ .
Există un alt vector în figură - p. Acest vector este perpendicular pe planul format de vectori v|| Și v ⊥ , |v ⊥ | = |p| (lungimile acestor vectori sunt egale) și p = n X v.
u ⊥ = v⊥ cosa + p sina
Dacă nu este clar de ce u⊥ se calculează astfel, amintiți-vă ce sunt sinusul și cosinusul și ce reprezintă înmulțirea unei valori scalare cu un vector.
Acum trebuie să scoatem din ultima ecuație v⊥ și p. Acest lucru se face folosind substituții simple:
v || = n(v · n) v ⊥ = v — v || = v — n(v · n) p = n X vu || = v || u ⊥ = v⊥ cosa + p sina = ( v — n(v · n)) cosa + ( n X v)sina u = u ⊥ + v || = (v — n(v · n)) cosa + ( n X v)sina + n(v · n)
Iată o astfel de squiggle!
Aceasta este formula de rotație vectorială v printr-un unghi a (alfa) în jurul vectorului n. Acum cu această formulă putem calcula vectorii de bază:

Exerciții
1. Obligatoriu:înlocuiți vectorii de bază în formula pentru rotația unui vector în jurul unei linii arbitrare. Numărați (folosind un creion și o bucată de hârtie). După toate simplificările, ar trebui să obțineți vectori de bază ca în ultima imagine. Exercițiul vă va dura zece minute.
Asta e tot.
Roman Shatalov 2009-2012
Introducere.
Quaternion
Operații de bază pe cuaternioni.
Cuaternioni de lungime unitară
Interpolare
Convertiți din două direcții
Compoziția rotațiilor
Fizică
Introducere.
Să definim pe scurt terminologia. Toată lumea își imaginează care este orientarea unui obiect. Termenul „orientare” implică faptul că ne aflăm într-un anumit cadru de referință. De exemplu, expresia „a întors capul la stânga” are sens doar atunci când ne imaginăm unde este „stânga” și unde era capul înainte. Acesta este un punct important de înțeles, pentru că dacă ar fi un monstru cu capul pe burtă cu vârful capului în jos, atunci expresia „și-a întors capul la stânga” nu ar mai părea atât de clară.
O transformare care se rotește într-un anumit mod de la o orientare la alta se numește rotație. Rotația poate descrie și orientarea unui obiect prin introducerea unei orientări implicite ca punct de referință. De exemplu, orice obiect descris cu un set de triunghiuri are deja o orientare implicită. Coordonatele vârfurilor sale sunt descrise în sistemul de coordonate local al acestui obiect. O orientare arbitrară a acestui obiect poate fi descrisă printr-o matrice de rotație în jurul sistemului său de coordonate local. De asemenea, puteți evidenția un lucru precum „rotația”. Prin rotație vom înțelege schimbarea orientării unui obiect într-un mod dat în timp. Pentru a seta în mod unic rotația, este necesar ca în orice moment să putem determina orientarea exactă a obiectului rotit. Cu alte cuvinte, rotația definește „calea” parcursă de un obiect la schimbarea orientării. În această terminologie, rotația nu specifică o rotație unică a unui obiect. Este important de înțeles că, de exemplu, matricea nu specifică o rotație unică a corpului, aceeași matrice de rotație poate fi obținută prin rotirea obiectului cu 180 de grade în jurul unei axe fixe și 180 + 360 sau 180 - 360. Eu folosesc acești termeni pentru a demonstra diferențele dintre concepte și în niciun caz nu insist să-l folosesc. Pe viitor, îmi rezerv dreptul de a spune „matrici de rotație”.
Cuvântul orientare este adesea asociat cu direcția. Puteți auzi adesea fraze precum „a întors capul spre locomotiva care se apropia”. De exemplu, orientarea unei mașini ar putea fi descrisă de direcția în care sunt îndreptate farurile sale. Cu toate acestea, direcția este dată de doi parametri (de exemplu, ca într-un sistem de coordonate sferice), iar obiectele din spațiul tridimensional au trei grade de libertate (rotație). În cazul unei mașini, aceasta poate privi în aceeași direcție atât stând pe roți, cât și întinsă pe o parte sau pe acoperiș. Orientarea poate fi într-adevăr setată prin direcție, dar două dintre ele sunt necesare. Să ne uităm la orientare folosind un exemplu simplu de cap uman.
Să ne punem de acord asupra poziției inițiale în care capul este orientat implicit (fără rotație). Pentru poziția inițială, luăm poziția în care capul privește cu fața în direcția axei „z”, iar în sus (coroana) privește în direcția axei „y”. Să numim direcția în care este rotită fața „dir” (fără rotație este la fel cu „z”), iar direcția în care se uită coroana „în sus” (fără rotație este la fel cu „y”). Acum avem un punct de referință, există un sistem de coordonate local al capului „dir”, „sus” și unul global cu axe x, y, z. Întoarceți capul în mod arbitrar și observați unde arată fața. Privind în aceeași direcție, este posibil să se rotească capul în jurul axei care coincide cu direcția de vizualizare „dir”.
De exemplu, înclinarea capului în lateral (apăsarea obrazului pe umăr) va arăta în aceeași direcție, dar orientarea capului se va schimba. Pentru a fixa rotația în jurul direcției vizuale, folosim și direcția „sus” (direcționată spre vârful capului). În acest caz, am descris fără ambiguitate orientarea capului și nu îl vom putea roti fără a schimba direcția axelor „dir” și „sus”.

Am considerat o modalitate destul de naturală și simplă de a seta orientarea folosind două direcții. Cum să descriem instrucțiunile noastre în program, astfel încât să fie convenabil de utilizat? Un mod simplu și familiar de a stoca aceste direcții ca vectori. Să descriem direcțiile folosind vectori de lungime unu (vectori unitari) în sistemul nostru de coordonate global xyz. Primul întrebare importantă, cum ne-am transmite indicațiile într-un mod ușor de înțeles către API-ul grafic? API-urile grafice funcționează în principal cu matrice. Am dori să obținem o matrice de rotație din vectorii disponibili. Doi vectori care descriu direcția „dir” și „sus” sunt aceeași matrice de rotație, sau mai degrabă două componente ale matricei de rotație 3×3. A treia componentă a matricei poate fi obținută din produsul încrucișat al vectorilor „dir” și „up” (să-i spunem „side”). În exemplul capului, vectorul „lateral” va îndrepta către una dintre urechi. Matricea de rotație este coordonatele celor trei vectori „dir”, „sus” și „lateral” după rotație. Înainte de rotație, acești vectori au coincis cu axele sistemului de coordonate global xyz. Orientarea obiectelor este foarte des stocată sub forma unei matrice de rotație (uneori, matricea este stocată sub formă de trei vectori). Matricea poate specifica orientarea (dacă este cunoscută orientarea implicită) și rotația.
O modalitate similară de reprezentare a orientării se numește unghiuri Euler, singura diferență fiind că direcția „dir” este dată în coordonate sferice, în timp ce „sus” este descris printr-o singură rotație în jurul „dir”. Ca rezultat, obținem trei unghiuri de rotație în jurul axelor reciproc perpendiculare. În aerodinamică, ele sunt numite Roll, Pitch, Yaw (Roll, Pitch, Yaw sau Bank, Heading, Attitude). Roll (Roll) este o înclinare a capului spre dreapta sau stânga (spre umeri), rotație în jurul unei axe care trece prin nas și spatele capului. Pasul este înclinarea capului în sus și în jos în jurul unei axe care trece prin urechi. Și Yaw întoarce capul în jurul gâtului. Trebuie amintit că rotațiile în spațiul tridimensional nu sunt comutative, ceea ce înseamnă că ordinea rotațiilor afectează rezultatul. Dacă ne întoarcem la R1 și apoi la R2, orientarea obiectului nu este neapărat aceeași cu orientarea la întoarcerea către R2 și apoi către R1. De aceea, atunci când se folosesc unghiuri Euler, ordinea rotațiilor în jurul axelor este importantă. Vă rugăm să rețineți că matematica unghiurilor Euler depinde de axele selectate (am folosit doar una dintre opțiunile posibile), de ordinea de rotație în jurul lor și, de asemenea, de sistemul de coordonate în care se fac rotațiile, în lume sau obiect local. . Unghiurile Euler pot stoca atât rotația, cât și rotația.
Un mare dezavantaj al acestei reprezentări este lipsa unei operații de combinație de rotație. Nu încercați să adăugați unghiuri Euler componentă cu componentă. Turnul final nu va fi o combinație a turelor originale. Aceasta este una dintre cele mai frecvente greșeli pe care le fac dezvoltatorii începători. Pentru a roti un obiect prin stocarea rotației în unghiuri Euler, trebuie să transpunem rotația într-o altă formă, cum ar fi o matrice. Apoi înmulțiți matricele a două rotații și extrageți unghiurile Euler din matricea finală. Problema se complică și mai mult de faptul că, în cazuri speciale, adunarea directă a unghiurilor Euler funcționează. În cazul unei combinații de rotații în jurul aceleiași axe, această metodă este corectă din punct de vedere matematic. Rotirea cu 30 de grade în jurul axei X și apoi rotirea din nou în jurul lui X cu 40 de grade, obținem o rotație în jurul X cu 70 de grade. În cazul rotațiilor de-a lungul a două axe, o simplă adăugare de unghiuri poate da un rezultat „așteptat”.
Se rostogolește, se înclină și se rotește
Dar de îndată ce există rotație de-a lungul celei de-a treia axe, orientarea începe să se comporte imprevizibil. Mulți dezvoltatori petrec luni de muncă încercând să facă camera să funcționeze „corect”. Vă recomand să acordați o atenție deosebită acestui neajuns, mai ales dacă ați decis deja să utilizați unghiurile Euler pentru a reprezenta rotațiile. Programatorilor începători li se pare că folosirea unghiurilor Euler este cea mai ușoară. Permiteți-mi să-mi exprim părerea personală că matematica unghiurilor Euler este mult mai complicată și mai insidioasă decât matematica cuaternionilor.
Unghiurile Euler sunt o combinație (compoziție) de rotații în jurul axelor de bază. Există o altă modalitate, mai simplă, de a seta rotația. Această metodă poate fi numită „amestec” de rotații în jurul axelor de coordonate de bază sau pur și simplu rotație în jurul unei axe fixe arbitrare. Trei componente care descriu rotația formează un vector situat pe axa în jurul căreia obiectul se rotește. De obicei, stocați axa de rotație ca un vector unitar și unghiul de rotație în jurul acestei axe în radiani sau grade (unghiul axei). Selectând axa și unghiul corespunzătoare, puteți seta orice orientare a obiectului. În unele cazuri, este convenabil să stocați unghiul de rotație și axa în același vector. Direcția vectorului în acest caz coincide cu direcția axei de rotație, iar lungimea acestuia este egală cu unghiul de rotație. În fizică, astfel, stocați viteza unghiulară. Un vector cu aceeași direcție ca axa de rotație și o lungime reprezentând viteza în radiani pe secundă.
Quaternion
După o scurtă privire de ansamblu asupra reprezentărilor de orientare, să trecem la o introducere în cuaternion.
Quaternion- acesta este un cvadruplu de numere care a fost pus în circulație (conform istoricilor) de William Hamilton sub forma unui număr hipercomplex. În acest articol, îmi propun să consider un cuaternion drept patru numere reale, cum ar fi un vector 4d sau un vector 3d și un scalar.
q = [ x, y, z, w ] = [ v, w ]
Există și alte reprezentări ale cuaternionului în care nu voi intra.
Cum este stocată rotația într-un cuaternion? La fel ca în reprezentarea „Unghiul axei”, primele trei componente reprezintă un vector situat pe axa de rotație, lungimea vectorului depinzând de unghiul de rotație. A patra componentă depinde doar de unghiul de rotație. Dependența este destul de simplă - dacă luăm un vector unitar V pe axa de rotatie si unghiul alfa pe rotatie in jurul acelei axe, apoi cuaternionul care reprezinta acea rotatie
poate fi scris ca:
q = [ V*sin(alfa/2), cos(alfa/2)]
Pentru a înțelege modul în care un cuaternion stochează o rotație, să ne amintim despre rotațiile bidimensionale. Rotația în plan poate fi specificată printr-o matrice 2×2, în care se vor scrie cosinusurile și sinusurile unghiului de rotație. Vă puteți gândi la un cuaternion ca stocând o combinație între o axă de rotație și o matrice de jumătate de rotație în jurul acelei axe.
Pagini: 123 Următorul »
#cuaternioane, #matematică