Rezumat: Modele de serii temporale staționare și identificarea acestora. Yakovleva A.V. Econometrie Modele liniare ale unei serii temporale staționare Modele ale unor serii temporale non-standard și identificarea acestora
O serie temporală stocastică se numește staționară dacă aceasta valorea estimata, varianța, autocovarianța și autocorelația vor fi constante în timp.
Principalele modele liniare ale serii de timp staționare sunt:
- modele de autoregresie;
- modele cu medii mobile;
- modele de autoregresie cu medie mobilă.
Nivelul seriei temporale reprezentat de modelul de autoregresie de ordine R, poate fi reprezentat astfel:
y t =δ 1 y t-1 +δ 2 y t-2 +…+δ p y t–p +ν t ,
vt – zgomot alb (valoare aleatorie cu zero așteptări matematice)
În practică, cel mai adesea pot fi utilizate modele autoregresive ale primului, al doilea, maxim al treilea ordine.
Model autoregresiv de ordinul întâi AP(1) numit " procesul Markov”, deoarece valorile variabilei y la ora curentă t depind doar de valorile variabilei y la momentul anterior (t–1) Acest model are forma:
y t =δy t–1 +ν t.
Pentru model AP(1) exista o restrictie |δ|<1 .
y t =δ 1 y t-1 +δ 2 y t-2 +ν t.
- (δ 1 + δ 2)<1;
- (δ 1 –δ 2)<1;
- |δ 2 |<1 .
Modelele medii mobile ᴏᴛʜᴏϲᴙ sunt reduse la o clasă simplă de modele de serie de timp cu un număr finit de parametri, care pot fi obținute prin reprezentarea nivelului seriei de timp ca suma algebrică a termenilor seriei de zgomot alb cu numărul de termeni. q.
Modelul de comandă cu medie mobilă generală q se pare ca:
y t =ν t –φ 1 ν t–1 –φ2ν t–2 –…–φqν t –q,
unde q este ordinea modelului mediei mobile;
φ t – coeficienții necunoscuți ai modelului de estimat;
ν t este zgomot alb.
Modelul de comandă medie mobilă q notat ca CC(q) sau MA(q)
În practică, modelele medii mobile ale primei CC(1)și de ordinul doi CC(2)
Coeficienți de model de ordine medie mobilă q nu trebuie să însumeze unul și nu trebuie să fie pozitiv.
Pentru a obține o mai mare flexibilitate a modelului seriei de timp în modelarea econometrică, în acesta sunt incluși atât termeni autoregresivi, cât și termeni medii mobile. Astfel de modele sunt numite modele mixte de autoregresie cu medie mobilă și sunt, de asemenea, legate de modele liniare ale serii de timp staționare.
Cel mai adesea, în practică, un model mixt ARCC(1) este utilizat cu un parametru autoregresiv p=1 și un parametru medie mobilă. q=1. Acest model arata astfel:
y t =δy t–1 +ν t –φν t–1 ,
φ este parametrul procesului mediei mobile;
ν t este zgomotul alb.
Coeficienții acestui model sunt supuși următoarelor restricții:
- |δ|<1 este condiția care asigură staționaritatea modelului mixt;
- | φ |‹1 este condiţia care asigură reversibilitatea modelului mixt.
Proprietatea de reversibilitate a modelului mixt APCC(p,q) înseamnă că modelul medie mobilă poate fi inversat sau rescris ca model autoregresiv de ordin nelimitat și invers.
De mare importanță în analiza seriilor de timp sunt seriile de timp staționare, ale căror proprietăți probabilistice nu se modifică în timp. Serii de timp staționare sunt utilizate, în special, în descrierea componentelor aleatoare ale seriei analizate.
O serie temporală y t (t= 1,2,…,n) este numită strict staționară (sau staționară în sens restrâns) dacă distribuția de probabilitate comună a n observații y 1 ,y 2 ,…..,y n este aceeași cu n observații y 1+ t ,y 2+ t ,....y n + t pentru orice n, t și t. Cu alte cuvinte, proprietățile seriei strict staționare y t nu depind de momentul t, i.e. legea distribuţiei şi caracteristicile sale numerice nu depind de t. Prin urmare, așteptarea matematică a y (t) = a, abaterea standard s y (t) = s poate fi estimată din observațiile y t (t= 1,2,…,n) folosind formulele:
 (6.3)
(6.3)
Cel mai simplu exemplu serii temporale staţionare, a căror așteptare matematică este egală cu zero, iar erorile e t sunt necorelate, este „zgomot alb”. Prin urmare, putem spune că perturbațiile (erorile) e t in modelul clasic de regresie liniară din zgomot alb, iar în cazul distribuției lor normale - normal (gauss) Zgomot alb.
Gradul de strângere al conexiunii dintre secvențele de observații ale seriei de timp y 1 ,y 2 ,…..,y n și y 1+ t ,y 2+ t ,....y n + t (deplasat față de fiecare altele cu e unități, sau, cum spunem cu decalajul t) pot fi determinate folosind coeficientul de corelație
 (6.4)
(6.4)
pentru 
Deoarece coeficientul r(t) măsoară corelația dintre membrii aceleiași serii, se numește coeficient de autocorelare, și dependența r(t) funcția de autocorelare. Datorită staționării serii de timp y t (t= 1,2,…,n), funcția de autocorelare r(t) depinde doar de lag t, iar funcția de corelație r(- t) = r(t) , adică când studiem r(t), ne putem limita să luăm în considerare numai valorile pozitive ale lui t.
Estimarea statistică r(t) este coeficientul de autocorelație al eșantionului r(t), determinat de formula coeficientului de corelație (3.20), în care x i = y t , y i = y t + t , iar n se înlocuiește cu n - t:

Se numește funcția r(t). funcția de autocorelare a eșantionului, iar graficul său este corelogramă.
Când se calculează r(t), trebuie amintit că pe măsură ce t crește, numărul n - t de perechi de observații y t ,y t + t scade, astfel încât lag t trebuie să fie astfel încât numărul n - t să fie suficient pentru a determina r (t). De obicei ele sunt ghidate de relaţia t £ n/4.
Pentru o serie de timp staționară, pe măsură ce decalajul t crește, relația dintre termenii seriei de timp y t și y t + t slăbește, iar funcția de autocorelare r(t) ar trebui să scadă (în valoare absolută). În același timp, pentru eșantionul său (empiric) analog r(t), în special cu un număr mic de perechi de observații n - t, proprietatea de scădere monotonă (în valoare absolută) cu creșterea t poate fi încălcată.
Alături de funcția de autocorelare, atunci când studiem serii de timp staționare, avem în vedere funcția de autocorelare parțială r parte (t), unde r parte (t) este coeficientul de corelație parțială dintre membrii seriei temporale y t și y t + t la eliminarea (eliminarea) influenței elementelor intermediare (între y t și y t + t).
Estimarea statistică a r part(t) este coeficient de probă autocorelație r coeficient (t) Unde partea r (t)- coeficientul de corelație parțială eșantion determinat prin formula (5.21) sau (5.22) De exemplu, coeficientul parțial de autocorelare eșantion de ordinul I între membrii seriei de timp y t și y t + t atunci când influența lui y t +1 este eliminată poate fi calculat prin formula (5.22):

unde r(1), r(1,2),r(2) – eșantion de coeficienți de autocorelare între y t și y t +1 , y t +1 și y t +2 , y t și y t +2 , t = 1,….,n.
Exemplul 6.1. Conform Tabelului. 6.1 pentru seria temporală y t găsiți valoarea medie, abaterea standard, coeficienții de autocorelație de ordinul I.
Soluţie. Valoarea medie a seriei de timp se găsește prin formula (6.2):
Varianta și abaterea standard pot fi calculate folosind formula (6.3), dar în acest caz este mai ușor să se folosească relația
Unde 
Să găsim coeficientul de autocorelație r(t) al seriei de timp (pentru decalajul t = 1), adică. coeficient de corelație între secvențe de șapte perechi de observații y t și y t + t (t = 1,2….,7).
Algoritm pentru construirea unui model de serie temporală pe exemplul modelelor aditive și multiplicative
Algoritmul pentru construirea unui model de serie temporală care include fluctuații ciclice constă din principalele etape, al căror conținut este oarecum diferit pentru modelele aditive și multiplicative.
Să simplificăm modelul introducând o singură denumire pentru componenta ciclică a seriei, indiferent de durata ciclului, sau de natura sa sezonieră sau oportunistă. Să notăm că este t . Atunci modelul aditiv va lua forma y t = u t + s t + e t , iar unul multiplicativ - y t = u t * s t * e t .
Deci, principalele etape ale construirii unui model:
1) Netezirea seriei originale pe baza unor medii, care sunt calculate pe o perioadă de timp corespunzătoare duratei ciclului.
2) Determinarea valorilor componentei ciclice sau sezoniere (pentru mai multe detalii, a se vedea Eliseeva I.I., Kurysheva S.V., Kosteeva T.V. et al. Econometrics: Textbook. - M .: Finance and Statistics, 2001. - P. 242-251. ). Pentru un model aditiv, suma valorilor acestei componente pentru toate perioadele unui ciclu trebuie să fie egală cu zero, iar într-un model multiplicativ, numărul de perioade dintr-un ciclu. Aceasta asigură răscumpărarea reciprocă a componentei ciclice.
3) Îndepărtarea componentelor ciclice din model. În modelul aditiv, se realizează prin scădere, după care modelul va lua forma y t = u t + e t . În modelul multiplicativ, se realizează prin împărțire, după care modelul va lua forma y t = u t * e t .
4) Alinierea analitică a seriei obţinute y t = u t + e t sau y t = u t * e t pe baza construcţiei ecuaţiei de tendinţă y t = f(t).
5) Componenta ciclică se adaugă la nivelurile obținute ale seriei (în cazul unui model aditiv) sau se înmulțește cu aceasta (în cazul unui model multiplicativ): y t = f(t) + s t sau y t = f( t) * s t .
6) Compararea valorilor calculate ale nivelurilor seriei, obținute cu ajutorul modelului construit, cu valorile reale. Evaluarea modelului rezultat, calculul erorilor.
Seriile temporale sunt de natură stocastică și, în consecință, pot fi calculate diferite caracteristici probabilistice pentru ele.
O serie de timp staționară este o serie de timp pentru care toate caracteristicile probabilistice sunt constante.
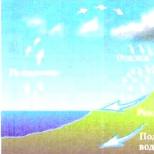
Aceasta înseamnă că indiferent de fragmentul seriei temporale pe care îl luăm, caracteristicile probabilistice ale valorilor indicatorului vor fi aceleași ca pentru orice alt interval de timp al acestei serii. Nu există o componentă de tendință în seria staționară.
O serie temporală nestaționară nu are această proprietate.
Serii temporale vizuale staționare și nestaționare sunt prezentate în Figura 5.1.
Distinge concepte slabȘi staționaritate strictă. Pentru a considera o serie ca slab staționară sau staționară în sensul larg al cuvântului, este suficient ca aceasta să aibă așteptări matematice, varianță și coeficienți de autocorelare constanti. Pentru o definire mai riguroasă a staționarității este necesară și constanța altor caracteristici probabilistice (funcția de distribuție trebuie să fie aceeași), care sunt studiate în detaliu în cursul teoriei probabilităților.
Trebuie amintit că orice serie strict staționară este, de asemenea, slab staționară, dar nu invers. Astfel, intersecția (partea comună) a mulțimii de serii slab staționare și mulțimea de serii strict staționare este mulțimea de serii strict staționare. Unirea setului de serii slab staționare și setul de serii strict staționare este setul de serii slab staționare (deoarece seriile strict staționare sunt incluse în seriile slab staționare).
Un exemplu de serie temporală staționară ar fi „zgomotul alb” în modelele de regresie (adică valorile ordonate în timp ale componentei aleatoare pentru care media și varianța sunt constante (caz în care valoarea așteptată a reziduului este zero) și aceste valori sunt necorelate între ele).
Seria ergodica. O proprietate importantă a unor serii staţionare este proprietatea ergodicitatea. Esența acestei proprietăți este că, pentru o serie ergodică, așteptarea matematică a nivelurilor sale în spațiu coincide cu așteptarea matematică a nivelurilor sale în timp.
Fie pentru un proces slab staționar în orice moment t așteptarea valorii M(y t) = µ (aceasta este așteptarea în spațiu). Așteptările matematice în timp sunt media n valori ale seriei de timp la n ® ¥. Dacă , atunci o astfel de serie este ergodică.
Cu alte cuvinte, pentru o serie de timp staționară, valoarea medie pe setul de realizări pentru anumite momente de timp este egală cu media în timp calculată pentru o realizare.
INTRODUCERE
Modelele existente de serii de timp sunt utilizate pe scară largă în procesul de studiu a dinamicii fenomenelor reale de natură variată. Ele sunt adesea utilizate în studiile dinamicii fluxurilor de mărfuri și pasageri, stocurile de mărfuri și depozite, procesele de migrație, analiza proceselor chimice, modelarea diferitelor evenimente naturale. Modelele serii cronologice sunt utilizate cel mai activ în analiza piețelor financiare, în evaluarea modificărilor indicatorilor financiari, în prognozarea prețurilor pentru diverse bunuri, a prețurilor acțiunilor, a ratelor de schimb etc.
O gamă largă de procese sociale și naturale reale poate fi reprezentată de obicei printr-un set de valori succesive ale indicatorului estimat y 1 , y 2 ,..., y t ,..., y T, care sunt fixate în anumite puncte în timpul t=1,2,.. .T, deci intervalul (t, t+1) este constant. Setul de valori specificat pentru t , t=1,2,... se numește de obicei o serie temporală (serie temporală). O astfel de serie este un proces în timp discret.
Modificări ale valorilor lui y t de-a lungul timpului în viața reală apar de obicei sub influența oricăror cauze, factori. Totuși, diversitatea lor, complexitatea măsurării, incertitudinea în ipotezele despre existența relațiilor cu variabila y complică foarte mult justificarea și construirea unui „adecvat” pentru descrierea procesului y t , t=1,2,... model econometric multifactorial de tip clasic. Prin urmare, se presupune adesea că influența combinată a acestor factori formează modele interne în raport cu procesul y t .
Această ipoteză are ca scop utilizarea modelelor econometrice dintr-o anumită clasă de modele de serie de timp pentru a descrie procesele în timp real.
MODELE STAȚIONARE SERIE DE CRONOLOGICĂ
Caracteristici ale seriilor de timp staționare și teste pentru staționaritate
Toate modelele serii temporale au o proprietate comună, care se bazează pe ipoteza unei dependențe semnificative a valorii curente a nivelului indicatorului y t de istoria acestuia. Cu alte cuvinte, nivelul indicatorului y t este generat de valorile y t-1 , y t-2 ,... pe baza regularităților caracteristice acestei serii de timp.
Această ipoteză este exprimată prin ecuația generală:
y t = f(y t-1 , y t-2 , …) + t (1.1)
unde t este eroarea modelului la momentul t.
Aici, funcția f reflectă natura relațiilor care există în seria temporală considerată y t, t=1,2,... Selectarea cu succes a funcției f determină un grad ridicat de aproximare a părții „deterministe” drepte a expresia (1.1) la valorile reale ale seriei. Gradul acestei aproximări este de obicei caracterizat de estimări și proprietăți de eroare ale seriei t, t=1,2,... în acest caz ne referim, în primul rând, la varianța minimă, corespondența cu zgomotul alb etc.
Pentru o gamă largă de procese, funcția f are o formă liniară. De exemplu,
y t = a 1 y t-1 + a n y t-n + t .
Modelele liniare ale serii de timp sunt utilizate, de regulă, pentru a descrie procesele staționare, în timp ce procesele staționare de ordinul doi sunt înțelese. Pentru un proces staționar de ordinul al n-lea, valorile tuturor momentelor sale de ordinul lui n și mai jos pe toate intervalele de timp incluse în intervalul t=1,2,..., T sunt constante. Procesele strict staționare se disting prin faptul că momentele lor de toate ordinele sunt constante. Din cele de mai sus rezultă că pentru oricare două intervale de timp (T 1 , T 2 ) și (T 3 , T 4) pentru un proces staționar de ordinul doi la t, trebuie îndeplinite următoarele condiții:
egalitatea așteptărilor matematice;
Egalitatea varianțelor;
Egalitatea coeficienților de autocorelație de un ordin.
Matematic, aceste condiții sunt exprimate prin relațiile:


unde - estimări ale așteptărilor matematice;
D 1 (y), D 2 (y) - estimări ale variațiilor;
Estimări ale coeficienților de autocorelație de ordinul i a procesului y t pe intervalele 1 și respectiv 2;
Valoarea medie a procesului (estimarea așteptării matematice) pe intervalul (1, T);
D(y) - estimarea dispersiei procesului pe intervalul (1, T).
Într-un studiu real al seriilor de timp staționare, egalitățile (1.2)-(1.4) sunt considerate în sens statistic. Acest lucru dă motive să se afirme că, chiar și cu o corespondență incompletă, ipoteza constanței așteptării matematice a procesului y t poate fi acceptată dacă valorile și un anumit criteriu statistic sunt îndeplinite.
Sunt utilizate diverse teste pentru a verifica dacă seria temporală y t, t=1,2,... este în concordanță cu procesul staționar și că sunt îndeplinite condițiile (1.2)-(1.4). Dacă rezultatele unuia dintre ele nu fac posibilă afirmarea adevărului sau falsității ipotezei prezentate, atunci poate fi necesar să se utilizeze mai multe teste pentru a testa aceeași condiție.
Întregul set de teste pentru staționaritatea seriilor de timp poate fi împărțit în trei grupuri principale: teste neparametrice, semiparametrice și parametrice.
Testele neparametrice nu avansează nicio informație despre legea distribuției seriei de timp testate, parametrii acesteia. Ele se bazează pe studiul relației dintre ordinea de succesiune a semnificațiilor care o formează, vă permit să identificați prezența sau absența modelelor în durata și (sau) alternarea seriei lor, formate, de exemplu, din secvențe. de unități ale populației cu aceleași semne, schimbarea semnelor acestor unități etc.
Testele semiparametrice folosesc ipoteze relativ slabe cu privire la natura distribuției valorilor seriilor temporale. Ele reflectă proprietățile generale ale funcției de distribuție a creșterilor de valori ale seriei - simetrie, aranjarea cuantilelor.
Când se utilizează metodele acestui grup, estimările parametrilor de distribuție sunt estimate prin statistici de ordine: media peste mediană, abaterea standard - pe intervalul nivelurilor seriei etc.
Testele parametrice sunt utilizate în baza unor ipoteze relativ stricte cu privire la legea distribuției seriei de timp și a parametrilor acesteia. Aceste teste fac posibilă aprecierea gradului de aproximare a caracteristicilor empirice (observate) ale distribuției seriilor temporale la nivelurile teoretice calculate.
Acest grad de aproximare face posibilă acceptarea sau respingerea ipotezei că proprietățile seriei considerate corespund unui proces staționar.
Destul de des, indicatorii economici prezentați ca o serie de timp au o structură complexă. Modelarea unor astfel de serii prin construirea unui model de trend, sezonalitate și componente periodice nu conduce la rezultate satisfăcătoare. Un număr de reziduuri au adesea modele statistice. Cele mai comune modele de serie staționară sunt modelele autoregresive și medii mobile.
Vom lua în considerare clasa de serii de timp staționare. Sarcina este de a construi un model de reziduuri de serie de timp u tși prezicerea valorilor sale.
Modelul autoregresiv este conceput pentru a descrie serii de timp staționare. Procesul staționar satisface ecuația de autoregresie de ordin infinit cu coeficienți în scădere destul de rapidă. Prin urmare, în special, un model autoregresiv de ordin suficient de mare poate aproxima bine aproape orice proces staționar. În acest sens, modelul autoregresiv este adesea folosit pentru a modela reziduurile într-unul sau altul model parametric, cum ar fi un model de regresie sau un model de tendință.
Procesele Markov sunt numite procese în care starea obiectului în fiecare moment următor de timp este determinată numai de starea din momentul prezent și nu depinde de modul în care obiectul a ajuns în această stare. În ceea ce privește analiza corelației pentru seriile de timp, procesul Markov poate fi descris astfel: există o corelație semnificativă statistic între seria originală și seria deplasată cu un interval de timp și nu există o corelație cu seria deplasată cu doi, trei , etc intervale de timp. În mod ideal, acești coeficienți de corelație sunt zero.
u(t)=m u(t-1)+e(t) , (5.1)
Unde m- coeficient numeric | m|<1, e(t) este o succesiune de variabile aleatoare care formează „zgomot alb” (E( e(t))=0, E( e(t)e(t+t))=).
Modelul (5.1) se mai numește și proces Markov.
E(u(t))º0. (5,2)
r(u(t)u(t± t))=m t . (5,3)
Du(t)=s 2 /(1-m 2). (5.4)
cov( u(t)u(t±t))= m t Du(t). (5.5)
Din (5.3) rezultă că pentru | m| aproape de variația unitară u(t) va fi mult mai mare decât varianța e t. Aceasta înseamnă (având în vedere (5.2) m=r(u(t)u(t±1))= r(1), adică parametru m poate fi interpretată ca o valoare de autocorelare de ordinul întâi), care în cazul unei corelații puternice a valorilor învecinate ale seriei u(t) o serie de perturbaţii slabe e t va genera oscilații mari ale reziduurilor u(t).
Condiția de staționaritate pentru seria (5.1) este determinată de cerința | m|<1.
Funcția de autocorelare (ACF) r(t) al procesului Markov este determinat de relația (5.3).
Funcția de autocorelare parțială
r frecvent ( t)=r(u(t)u(t+t)) | u(t+ 1)=u(t+ 2)=…=u(t+t-1)=0
se poate calcula cu formula: r partea (2)=( r(2)-r 2 (1))/(1-r 2 (1)). Pentru ordinea a doua și cea mai mare (vezi, pp. 413, 414) ar trebui să fie r frecvent ( t)=0 "t=2,3,... . Este convenabil să folosiți acest lucru pentru potrivirea modelului (5.1): dacă este calculat din reziduurile estimate u(t)=YT-corelațiile parțiale ale eșantionului sunt statistic nesemnificativ diferite de zero la t=2,3,…, apoi folosind modelul AR(1) pentru descrierea reziduurilor aleatoare nu contrazice datele originale.
Identificarea modelului. Este necesară estimarea statistică a parametrilor mȘi s 2 modele (5.1) conform valorilor disponibile ale seriei originale YT.