Momentul unghiular al particulei. Moment de putere. Note de curs Momentul momentului particulelor elementare cuvinte încrucișate 4 litere
Momentul unghiular al particulei(punctul material) relativ la punctul O se numește mărime vectorială egală cu:
L- vector axial. Direcția vectorului moment unghiular L este determinată astfel încât rotația în jurul punctului O în direcția vectorului p în jurul axei care trece prin punctul O să respecte regula șurubului drept. Vectorul r, p și L formează un sistem șurub drept. În sistemul SI, momentul unghiular are o unitate de măsură: [L]=1 kg m 2 / s.
Luați în considerare două exemple de calculare a momentului unghiular al unei particule în raport cu punctul O.
Exemplul 1 . Particula se deplasează de-a lungul unei traiectorii rectilinie, masa particulei-m, impuls-p. Găsiți L și ½ L½. Să facem un desen.

din formula (22.4.) rezultă că modulul momentului unghiular poate fi modificat doar prin modificarea modulului vitezei, deoarece când se deplasează pe o cale dreaptă, umărul l ramane constant.
Exemplul 2 . O particulă de masă m se mișcă de-a lungul unui cerc de rază R cu viteza V. Aflați L și ½ L½ . Să facem un desen.

Fig.22.3.Directia vectorului moment al unei particule care se deplaseaza de-a lungul unui cerc de raza R cu viteza V.
|
(22 .5 ) |
|
(22 .6 ) |
Momentul unghiular este considerat relativ la punctul C. Din formula (22.6.) rezultă că modulul momentului unghiular se poate modifica doar prin modificarea modulului vitezei. În ciuda schimbării continue a direcției vectorului p, direcția vectorului L rămâne constantă.
Pe lângă energie și impuls, mai există o cantitate fizică. Cu care este asociată legea conservării - acesta este momentul unghiular. Momentul unghiular al unei particule în raport cu punctul O se numește vector  egal
egal  ,
, -rază; -puls.
-rază; -puls.
Acestea.  este??? vector. Direcția sa este aleasă astfel încât rotația în jurul lui O în direcția
este??? vector. Direcția sa este aleasă astfel încât rotația în jurul lui O în direcția  și vector
și vector  formează un sistem corect de șuruburi. Modul
formează un sistem corect de șuruburi. Modul 
 unghi între
unghi între  Și
Și 
 umăr vector
umăr vector  referitor la O.
referitor la O.
Să aflăm ce valoare este asociată cu modificarea vectorului  la timp:
la timp:

 .
.
T  .to așa că este nemișcat, atunci
.to așa că este nemișcat, atunci  este egală cu viteza particulei, adică coincide cu
este egală cu viteza particulei, adică coincide cu  , adică
, adică  . Mai departe
. Mai departe  - A doua lege a lui Newton și
- A doua lege a lui Newton și  ; Valoare
; Valoare  - vectorul axial al momentului forței.
- vectorul axial al momentului forței.  ,
, - puterea umerilor
- puterea umerilor  referitor la t.O.
referitor la t.O.
Astfel, derivata cu privire la  impuls unghiular
impuls unghiular  particule, în raport cu unele t.O ale sistemului de referință ales este egală cu momentul forței rezultante
particule, în raport cu unele t.O ale sistemului de referință ales este egală cu momentul forței rezultante  despre acest punct
despre acest punct  . Această ecuație se numește ecuația momentului.
. Această ecuație se numește ecuația momentului.
Dacă cadrul de referință este neinerțial, atunci în momentul forței  include atât momentul forțelor de interacțiune cât și momentul forțelor de inerție (relativ la același t.O). Din ecuaţia momentelor rezultă că dacă
include atât momentul forțelor de interacțiune cât și momentul forțelor de inerție (relativ la același t.O). Din ecuaţia momentelor rezultă că dacă  , Acea
, Acea  - Mișcare uniformă de rotație. Acestea. dacă momentul tuturor forțelor relativ la t.O al cadrului de referință este egal cu O, în timpul de interes pentru noi
- Mișcare uniformă de rotație. Acestea. dacă momentul tuturor forțelor relativ la t.O al cadrului de referință este egal cu O, în timpul de interes pentru noi  , atunci momentul unghiular al particulei în jurul acestui punct rămâne constant.
, atunci momentul unghiular al particulei în jurul acestui punct rămâne constant.
Ecuația momentului vă permite să găsiți  puncte în raport cu O în orice moment dacă sunt cunoscute
puncte în raport cu O în orice moment dacă sunt cunoscute  particule relativ la un punct. Pentru a face acest lucru, este suficient să diferențiem ecuația
particule relativ la un punct. Pentru a face acest lucru, este suficient să diferențiem ecuația  . În plus, dacă relația este cunoscută
. În plus, dacă relația este cunoscută  , atunci puteți găsi creșterea momentului unghiular al particulei în raport cu t.O pentru orice perioadă de timp. Pentru aceasta, este necesară integrarea ecuației
, atunci puteți găsi creșterea momentului unghiular al particulei în raport cu t.O pentru orice perioadă de timp. Pentru aceasta, este necesară integrarea ecuației  , Apoi
, Apoi

Expresie  -momentul moment al forţei ca
-momentul moment al forţei ca  , adică creșterea momentului unghiular al particulei pentru orice perioadă de timp este egală cu momentul momentului de forță pentru e
, adică creșterea momentului unghiular al particulei pentru orice perioadă de timp este egală cu momentul momentului de forță pentru e
acel timp.
4.3. Momentul impulsului și momentul forței în jurul axei.
ÎN 
 să luăm în cadrul de referință care ne interesează o axă fixă arbitrară
să luăm în cadrul de referință care ne interesează o axă fixă arbitrară  . Fie relativ la o axa t.O
. Fie relativ la o axa t.O  momentul unghiular al particulei este
momentul unghiular al particulei este  , și momentul forțelor
, și momentul forțelor  . Momentul unghiular
. Momentul unghiular  se numeste proiectie pe aceasta axa a vectorului
se numeste proiectie pe aceasta axa a vectorului  , definită în raport cu un punct arbitrar O al axei date. În mod similar, este introdus conceptul de moment al forței în jurul axei
, definită în raport cu un punct arbitrar O al axei date. În mod similar, este introdus conceptul de moment al forței în jurul axei  . Ecuația momentului în jurul axei
. Ecuația momentului în jurul axei 
 acestea. derivat al
acestea. derivat al  relativ
relativ  este egal cu
este egal cu  despre această axă. Mai ales când
despre această axă. Mai ales când 
 . Acestea. dacă momentul nămolului în jurul unor axe
. Acestea. dacă momentul nămolului în jurul unor axe  este egal cu 0, atunci
este egal cu 0, atunci  despre această axă rămâne constantă. În acest caz, vectorul
despre această axă rămâne constantă. În acest caz, vectorul  se schimba.
se schimba.
4.4. Legea conservării momentului unghiular al sistemului.
Luați în considerare un sistem format din 2 particule, care sunt, de asemenea, afectate de forțe  Și
Și  . Momentul unghiular este o mărime aditivă. Pentru un sistem, este egal cu suma vectorială a momentului unghiular al particulelor individuale în raport cu același punct
. Momentul unghiular este o mărime aditivă. Pentru un sistem, este egal cu suma vectorială a momentului unghiular al particulelor individuale în raport cu același punct  .
.
Noi stim aia  - momentul tuturor forțelor care acționează asupra particulei și modificarea momentului sistemului
- momentul tuturor forțelor care acționează asupra particulei și modificarea momentului sistemului  , Apoi
, Apoi  ;
; ;
;
 - momentul total al tuturor forțelor interne care acționează asupra particulelor.
- momentul total al tuturor forțelor interne care acționează asupra particulelor.
 - momentul total al tuturor forțelor externe care acționează asupra particulelor.
- momentul total al tuturor forțelor externe care acționează asupra particulelor.
Deci pentru două particule:
Momentul total al forțelor interne relativ la orice punct este 0. Forțele de interacțiune dintre particule  3 fiecare mu
Legea lui Newton acționează într-o singură linie dreaptă, ceea ce înseamnă că au același umăr, deci momentul fiecărei perechi de forțe interne este 0.
3 fiecare mu
Legea lui Newton acționează într-o singură linie dreaptă, ceea ce înseamnă că au același umăr, deci momentul fiecărei perechi de forțe interne este 0.
Acea.  ; acestea. sistemele se schimbă sub influența forțelor externe
; acestea. sistemele se schimbă sub influența forțelor externe  . Dacă nu există forțe exterioare
. Dacă nu există forțe exterioare  ,
, , atunci, este o cantitate conservată aditivă. Acestea. momentul unghiular al unui sistem închis de particule rămâne constant, nu se modifică în timp. Acest lucru este valabil pentru orice punct din cadrul de referință inerțial:
, atunci, este o cantitate conservată aditivă. Acestea. momentul unghiular al unui sistem închis de particule rămâne constant, nu se modifică în timp. Acest lucru este valabil pentru orice punct din cadrul de referință inerțial:  acestea. impulsul părților individuale
acestea. impulsul părților individuale  o parte a sistemului apar din cauza pierderii
o parte a sistemului apar din cauza pierderii  altă parte (relativ la un punct).
altă parte (relativ la un punct).
Legea este valabilă și într-un cadru de referință non-inerțial în acele cazuri în care momentul total al tuturor forțelor externe, inclusiv forțele de inerție, este egal cu zero.
W  Legea joacă același rol ca legea conservării energiei impulsului. Vă permite să rezolvați diferite probleme fără a lua în considerare detaliile proceselor interne. Exemplu: overclocking????
Legea joacă același rol ca legea conservării energiei impulsului. Vă permite să rezolvați diferite probleme fără a lua în considerare detaliile proceselor interne. Exemplu: overclocking????
impuls unghiular  ;
; acestea.
acestea.  scade pe măsură ce
scade pe măsură ce  . Acest efect este utilizat pe scară largă de gimnaste, patinatori artistici etc. aici ne interesează forțele de interacțiune etc. în sistemele neînchise, este posibil să nu fie păstrat
. Acest efect este utilizat pe scară largă de gimnaste, patinatori artistici etc. aici ne interesează forțele de interacțiune etc. în sistemele neînchise, este posibil să nu fie păstrat  , și proiecția sa pe o axă fixă
, și proiecția sa pe o axă fixă  . Se întâmplă când
. Se întâmplă când  toate forțele externe.
toate forțele externe.
 ;
; ;
;
În fizică, conceptul de moment unghiular este extins la sistemele nemecanice (cu radiații electromagnetice, în atomi, nuclee etc.) unde legile lui Newton nu se aplică. Aici legea conservării momentului unghiular nu mai este o consecință a legilor lui Newton, ci este independent principiu, este o generalizare a faptelor experimentale și este una dintre legile fundamentale alături de legile conservării energiei și impulsului.
Pe lângă conservarea momentului și energiei în sistemele închise, se mai păstrează o mărime fizică - momentul unghiular. Se consideră mai întâi produsul vectorial al vectorilor și (Fig. 32).
Un produs vectorial al vectorilor se numește un astfel de vector, al cărui modul este egal cu:
unde este unghiul dintre vectorii si .
Direcția vectorului este determinată de regula gimlet dacă acesta este rotit de la spre în de-a lungul drumului cel mai scurt.
Există o expresie pentru determinarea produsului încrucișat:
1. Moment de forță în jurul unui punct și în jurul unei axe.
Să introducem mai întâi conceptul de moment al forței. Fie ca o anumită forță să acționeze asupra unei particule a cărei poziție este determinată folosind vectorul rază relativ la originea punctului 0 (Fig. 33).
Să numim momentul forței în jurul punctului 0 mărime vectorială:
În acest caz, vectorul momentului de forță este îndreptat perpendicular pe planul figurii către noi. Din figură rezultă că valoarea lui . Să-i spunem umărul momentului de forță. Umărul momentului de forță este distanța de la punctul de referință 0 la linia de acțiune a forței.
Momentul de forță în jurul unei axe care trece prin punctul 0 este proiecția vectorului momentului de forță în jurul punctului 0 pe această axă.
2. Momentul unei perechi de forțe. Proprietățile momentului unei perechi de forțe.
Luați în considerare două forțe paralele, egale ca mărime, opuse ca direcție, care nu acționează de-a lungul unei linii drepte (Fig. 34). Astfel de forțe se numesc pereche de forțe. Distanţa dintre liniile drepte de-a lungul cărora acţionează aceste forţe se numeşte umărul perechii.
Următoarele denumiri sunt introduse aici:
Vectorul rază al punctului de aplicare a forței,
Vectorul rază a punctului de aplicare a forței în raport cu punctul de aplicare a forței.
Momentul total al acestei perechi de forțe este definit ca:
Deoarece forțele formează o pereche, atunci, deci:
Se poate observa că momentul unei perechi de forțe nu depinde de alegerea originii punctelor de aplicare a forțelor.
3.Momentul de impuls al particulei relativ la axă și relativ la punct.
Să ne întoarcem acum la conceptul de moment unghiular. Fie ca o particulă de masă m, a cărei poziție este determinată folosind vectorul rază relativ la originea punctului 0, se mișcă cu viteză (Fig. 35).
Să introducem un vector , pe care îl vom numi momentul unghiular al particulei în raport cu punctul 0. Vom numi valoarea umărul momentului unghiular relativ la punctul 0.
Momentul unghiular în jurul axei care trece prin punctul 0 este proiecția momentului unghiular în jurul punctului pe această axă.
1. Luați în considerare mișcarea de-a lungul unei linii drepte. La o înălțime h, un avion de masa m zboară orizontal cu viteza V (fig. 36).
Să găsim momentul unghiular al aeronavei în raport cu un punct 0. Modulul momentului unghiular este egal cu produsul dintre impuls și brațul său. În acest caz, brațul impulsului este egal cu h. Prin urmare:
2. Luați în considerare mișcarea într-un cerc. O particulă de masă m se deplasează de-a lungul unui cerc de rază R cu o viteză modulo V constantă (Fig.37). Aflați momentul unghiular al particulei în jurul centrului cercului 0.
Momentul unghiular al particulei M== рR=const.
4. Ecuația momentului particulei
Prin definiție, momentul unghiular al unei particule în raport cu un punct 0 este:
Să găsim derivata în timp a părților din dreapta și din stânga acestei expresii:
Primul termen dispare conform regulii produsului vectorial. Avem in sfarsit:
Această expresie se numește ecuația momentului particulei.
Rata de modificare a momentului unghiular este egală cu momentul forțelor.
5. Momentul de impuls al sistemului de particule.
Legea schimbării și conservării momentului unghiular al unui sistem de particule.
Luați în considerare un sistem de particule care interacționează între ele, asupra cărora se acționează forțele externe. Setăm poziția în spațiu a particulelor acestui sistem folosind vectori cu rază în raport cu o origine 0. Să scriem momentul unghiular total al acestui sistem în raport cu punctul:
Găsiți modificarea momentului total:
Să scriem acest sistem de ecuații:
…………………………………..
Însumăm părțile din stânga și dreapta ale acestui sistem și luăm în considerare sumele pe perechi în primul termen din dreapta.
Conform celei de-a treia legi a lui Newton, toate celelalte sume perechi vor dispărea și ele. În consecință, momentul total al tuturor forțelor interne de interacțiune dintre particule este egal cu zero. Atunci ramane:
Momentul unghiular al unui sistem de particule modifică momentul forțelor externe. Pentru un sistem închis de particule, legea conservării momentului unghiular este îndeplinită.
6. Momentul orbital și propriu al impulsului sistemului de particule.
Să considerăm un sistem de N particule a cărui poziţie este stabilită folosind vectori cu rază relativ la un punct de referinţă 0 (Fig. 38).
Fie poziția centrului de masă C al acestui sistem să fie determinată folosind vectorul rază . Atunci poziția i-a particule în raport cu originea 0 este definită ca:
Să scriem momentul unghiular total al sistemului de particule relativ la originea 0:
Primul termen se numește momentul unghiular orbital al sistemului:
Al doilea termen se numește momentul intrinsec al sistemului:
Atunci momentul unghiular total al sistemului relativ la punctul de referință 0 are forma:
7. Mișcarea în câmpul central de forțe.
Luați în considerare o particulă care se mișcă într-un câmp de forță central. Amintiți-vă că într-un astfel de câmp forța care acționează asupra unei particule depinde doar de distanța dintre particulă și origine. În plus, forța este întotdeauna direcționată de-a lungul vectorului rază al particulei.
Este ușor de înțeles că în acest caz momentul forței centrale este egal cu zero și, prin urmare, legea de conservare a momentului unghiular relativ la origine este îndeplinită.
Deoarece , atunci traiectoria particulei este întotdeauna situată în planul în care se află vectorii forță și vectorul rază. În câmpul central, particulele se deplasează de-a lungul traiectoriilor plate.
În timpul dt, vectorul rază al particulei va descrie aria dS (Fig. 39).
Această zonă este egală cu jumătate din aria paralelogramului construit pe vectorul rază și vectorul elementar de deplasare. După cum știți, aria unui astfel de paralelogram este egală cu modulul produsului încrucișat. Astfel, acum putem scrie:
Să numim valoarea - viteză sectorială și pentru aceasta obținem expresia:
Deoarece în câmpul central M =const, atunci, în consecință, viteza sectorială rămâne constantă.
Concluzie: atunci când o particulă se mișcă într-un câmp de forță central, vectorul ei cu rază descrie zone egale în intervale de timp egale.
Această afirmație este a doua lege a lui Kepler.
8. Problema a două corpuri.
Problema mișcării particulelor într-un câmp de forță central are multe aplicații. Luați în considerare problema mișcării a două corpuri. Luați în considerare două particule care interacționează numai între ele. Să aflăm cum se comportă centrul de masă al unui astfel de sistem. Din teorema privind mișcarea centrului de masă al unui sistem închis, putem concluziona că acesta fie se odihnește, fie se mișcă în linie dreaptă și uniform.
Vom rezolva problema a două corpuri din sistemul centrului lor de masă. După cum se știe, vectorul rază a centrului de masă al sistemului este determinat folosind expresia:
Din legea conservării impulsului unui astfel de sistem închis rezultă că:
Să introducem un vector rază care determină poziția celei de-a doua particule în raport cu prima (Fig. 40):
Apoi este posibil să se obțină expresii pentru relația vectorilor cu rază care determină poziția particulelor față de centrul lor comun de masă, cu vectorul rază al poziției lor relative:
Să luăm acum în considerare această problemă din punct de vedere energetic. Să notăm cu și - vitezele particulelor în raport cu centrul lor de masă și prin - viteza celei de-a doua particule în raport cu prima. Apoi, din legea conservării impulsului unui sistem de particule se pot obține următoarele expresii:
Să scriem energia mecanică totală a acestui sistem de particule:
Aici U(r 21) este energia potențială proprie a sistemului.
Această expresie poate fi transformată în felul următor:
unde se introduce următoarea denumire - masa redusă.
Vedem din punct de vedere al energiei, acest sistem de particule se comportă ca o singură particulă cu o masă redusă și care se mișcă cu o viteză relativă. Problema a două corpuri se reduce la problema mișcării unui singur corp.
Dacă dependența este cunoscută, atunci se poate rezolva și problema principală, adică. găsi dependențe și .
Să scriem ecuația mișcării (a doua lege a lui Newton) pentru fiecare dintre particulele din câmpul central:
Există un semn minus în partea dreaptă a celei de-a doua ecuații, deoarece .
Împărțind prima ecuație la m 1 și a doua la m 2, obținem:
Scădeți prima ecuație din a doua:
Apoi in sfarsit:
De aici puteți găsi dependența.
9. Mișcarea sateliților artificiali. viteze spațiale.
Luați în considerare mișcarea unui satelit artificial al Pământului în apropierea suprafeței sale. Deoarece doar o singură forță acționează asupra satelitului - forța de atracție gravitațională asupra Pământului, atunci putem scrie ecuația mișcării sale într-un cerc:
unde m este masa satelitului, M este masa Pământului, Rz este raza Pământului.
De aici puteți obține viteza satelitului:
Înlocuind valorile corespunzătoare, obținem viteza V 1 = 8 km/s.
Această viteză se numește primul spatiu(viteza care trebuie raportată corpului pentru ca acesta să devină un satelit al Pământului în apropierea suprafeței sale).
Am revizuit cel mai simplu caz mișcarea satelitului pe o orbită circulară. Cu toate acestea, după cum arată teoria, în problema celor două corpuri, sunt posibile și alte traiectorii de mișcare ale unei particule în raport cu alta - elipse, hiperbole și parabole. Orbitele eliptice corespund valorii negative a energiei mecanice totale a sistemului, orbitele hiperbolice corespund valoare pozitivă energia mecanică totală și orbitele parabolice corespund valorii energiei mecanice totale egale cu zero.
Să găsim așa-numitul a doua viteză spațială. Aceasta este viteza care trebuie transmisă corpului pentru ca acesta să devină un satelit al Soarelui, în timp ce corpul trebuie să se miște de-a lungul unei traiectorii parabolice.
Să notăm energia mecanică totală a sistemului satelit-Pământ, considerând că Pământul este nemișcat:
Echivalând energia mecanică totală cu zero, obținem a doua viteză cosmică:
Înlocuind valorile corespunzătoare, obținem V 2 = 11,2 km/s.
MECANICA CORPORILOR SOLIDE
VIII. Cinematică corp solid
1. Absolut solid. Mișcarea plană a unui corp rigid și descompunerea lui în translație și rotație.
Până acum am folosit un punct material ca model fizic, dar nu toate problemele pot fi rezolvate în această aproximare. Să trecem acum la așa-numitul corpuri absolut rigide. Un corp absolut rigid este un corp în care distanța dintre particulele din care constă nu se modifică. Cu alte cuvinte, nu este absolut un corp deformabil.
Vom lua în considerare mișcare plată corp rigid, în care în timpul mișcării oricare dintre punctele sale rămâne într-unul din planurile paralele. Într-o mișcare plană, traiectorii fiecărui punct al unui corp rigid se află în același plan, iar planurile tuturor traiectorilor fie coincid, fie sunt paralele.
Orice mișcare complexă a unui corp rigid poate fi reprezentată ca o sumă a mai mult de mișcări simple: translațional și rotațional . Translativ numită o astfel de mișcare a unui corp rigid în care o linie care leagă oricare două puncte ale corpului își păstrează direcția în spațiu. Mișcarea de translație nu este neapărat liniară, de exemplu, o cabină într-o roată ferris (Fig. 41).
rotativ numită o astfel de mișcare în care traiectoriile tuturor punctelor unui corp rigid sunt cercuri concentrice cu un centru situat pe axa de rotație. Un cilindru care se rostogolește pe o masă realizează atât mișcare de translație, cât și mișcare de rotație în jurul axei sale de simetrie.
Să arătăm cum mișcarea plană poate fi descompusă în translație și rotație (Fig. 42).
Din figură se poate observa că din poziţia 1 în poziţia 2 corpul poate fi deplasat mai întâi în poziţia translaţională, iar apoi în poziţia 2 rotativ în jurul axei. O astfel de împărțire în mișcare de translație și rotație se poate face la nesfârșit. un numar mare moduri, dar rotația este întotdeauna efectuată după același unghi.
Astfel, mișcarea plană poate fi reprezentată ca translație cu aceeași viteză pentru toate punctele corpului și rotațională cu aceeași viteză unghiulară. Pentru vitezele liniare ale punctelor unui corp rigid, aceasta poate fi scrisă astfel:
Iată vectorul rază al oricărui punct al corpului rigid.
De exemplu, rularea unui cilindru pe o suprafață orizontală (Fig. 43) poate fi reprezentată ca o mișcare de translație a tuturor punctelor cu o viteză V 0 și rotație în jurul unei axe care coincide cu axa sa de simetrie 0, cu o viteză unghiulară . , sau ca mișcare de translație cu o viteză și rotație cu aceeași viteză unghiulară, dar în jurul axei.
Mișcarea unui corp rigid poate fi reprezentată ca un set de numai rotații în jurul așa-numitei axe instantanee. Această axă poate fi fie în interiorul corpului rigid în sine, fie poate fi în afara acestuia. Poziția axei instantanee se modifică în timp. În cazul unui cilindru rulant, axa instantanee coincide cu linia de contact dintre cilindru și plan.
Să reprezentăm în fig. 44 direcția vitezelor instantanee ale unor puncte ale cilindrului în raport cu cadrul fix de referință. Viteza punctului A este egală cu zero în fiecare moment de timp, deoarece. este suma vitezei de translație și a vitezei liniare egale în valoare absolută. Viteza punctului C este de două ori mai mare decât viteza și așa mai departe.
Să vedem cum este orientată viteza în raport cu cadrul fix de referință al oricărui punct al cilindrului. Pentru a face acest lucru, scriem condiția unui corp absolut rigid pentru două puncte arbitrare în următoarea formă:
Diferențierea în timp a părții dreaptă și stângă:
Conectăm punctul A cu axa instantanee de rotație, apoi și . Prin urmare, avem:
Această condiție implică perpendicularitatea vectorilor corespunzători, i.e. .
O analiză a comportamentului sistemelor arată că, pe lângă energie și impuls, există o altă mărime mecanică, care este asociată și cu legea conservării, aceasta este așa-numita impuls unghiular. Ei folosesc, de asemenea, termenii moment al impulsului, moment de rotație, moment unghiular sau pur și simplu impuls.
Ce este această cantitate și care sunt proprietățile ei?
Să luăm mai întâi o particulă. Fie vectorul rază care caracterizează poziția sa relativ la un punct O sistemul de referință selectat și - impulsul său în acest sistem. Momentul unghiular al particulei A relativ la punct O(Fig. 6.1) numiți vectorul egal cu produsul vectorial al vectorilor și:
Din această definiție rezultă că este un vector axial. Direcția sa este aleasă astfel încât rotația în jurul punctului Oîn direcția vectorului formează un sistem șurub drept. Modulul vectorului este
| | (6.2) |
unde este unghiul dintre vectori și ![]() umărul vectorului relativ la punct DESPRE(Fig. 6.1).
umărul vectorului relativ la punct DESPRE(Fig. 6.1).
Să derivăm o ecuație care descrie schimbarea în timp a vectorului. El este numit ecuația momentului. Pentru concluzie, este necesar să se afle ce mărime mecanică este responsabilă pentru schimbarea vectorului într-un dat
sistem de referință. Să diferențiem ecuația (6.1) în funcție de timp:

De la punctul O este nemișcat, atunci vectorul egal cu viteza particule, adică coincide în direcția cu vectorul, prin urmare
Folosind a doua lege a lui Newton, obținem unde este rezultanta tuturor forțelor aplicate particulei. Prin urmare,
Mărimea din partea dreaptă a acestei ecuații se numește moment de forta relativ la punct DESPRE(Fig. 6.2). Notând-o cu litera , scriem
Vectorul, ca , este axial. Modulul acestui vector, similar cu (6.2), este egal cu
Această ecuație se numește ecuația momentului. Rețineți că, dacă cadrul de referință este neinerțial, atunci momentul de forță include atât momentul forțelor de interacțiune, cât și momentul forțelor de inerție în jurul aceluiași punct. O.
Din ecuația momentelor (6.5), în special, rezultă că dacă atunci . Cu alte cuvinte, dacă în raport cu un punct O al cadrului de referință ales, momentul tuturor forțelor care acționează asupra particulei este egal cu zero în intervalul de timp care ne interesează, atunci în raport cu acest punct momentul unghiular al particulei rămâne constant. în această perioadă.
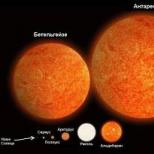
Exemplul 1. O anumită planetă A se mișcă și câmpul gravitațional al Soarelui C (Fig. 6.3). Relativ la ce punct al cadrului de referință heliocentric se va conserva în timp momentul unghiular al unei planete date?
Pentru a răspunde la această întrebare, în primul rând, este necesar să se stabilească ce forțe acționează pe planeta A. În acest caz, aceasta este doar forța gravitației
din partea soarelui. De când planeta se mișcă, direcția acestei forțe
trece tot timpul prin centrul Soarelui, apoi acesta din urmă este punctul față de care momentul de forță este întotdeauna egal cu zero și momentul unghiular al planetei va rămâne constant. Elanul planetei se va schimba atunci.
Exemplul 2. Saiba A, deplasându-se de-a lungul unui plan orizontal neted, returează elastic dintr-un perete vertical neted (Fig. 6.4, vedere de sus). Găsiți punctul în care momentul unghiular al pucului va rămâne constant în acest proces.
Pucul este acționat de forța gravitației, forța de reacție din partea planului orizontal, forța de reacție din partea laterală a peretelui în momentul impactului împotriva acestuia. Primele două forțe se echilibrează reciproc, forța rămâne. Momentul său este egal cu zero față de orice punct situat pe linia de acțiune a vectorului, ceea ce înseamnă că în raport cu oricare dintre aceste puncte, momentul unghiular al pucului va rămâne constant în acest proces.
Exemplul 3. Pe un plan neted orizontal se află un cilindru vertical fix și o șaibă A conectate la cilindru printr-un filet AB (Fig. 6.5, vedere de sus). Pucului i s-a dat o viteză inițială, așa cum se arată în această figură. Există un punct aici despre care momentul unghiular al pucului va rămâne constant în timpul mișcării?
În acest caz, singura forță necompensată care acționează asupra șaibei A este forța de întindere din partea laterală a firului. Este ușor de observat că nu există niciun punct în care momentul forței în procesul de mișcare să fie egal cu zero tot timpul. Și, în consecință, nu există niciun punct în raport cu care momentul unghiular al pucului să rămână constant. Acest exemplu arată că nu există întotdeauna un punct în jurul căruia momentul unghiular al unei particule ar rămâne constant.
Ecuația momentului (6.5) permite răspunsul la două întrebări:
1) găsiți momentul de forță relativ la punctul O care ne interesează în orice timpul t, dacă este cunoscută dependența de timp a momentului unghiular al particulei față de același punct;
2) determinați incrementul momentului unghiular al particulei în raport cu punctul O pentru orice perioadă de timp, dacă este cunoscută dependența de timp a momentului de forță care acționează asupra acestei particule în raport cu același punct O.
Soluția primei întrebări se reduce la găsirea derivatei în timp a momentului de impuls, adică, care este egală, conform (6.5), cu momentul de forță dorit.
Rezolvarea celei de-a doua întrebări se reduce la ecuația integratoare (6.5). Înmulțind ambele părți ale acestei ecuații cu dt, obținem - o expresie care determină incrementul elementar al vectorului. Integrând această expresie în timp, găsim incrementul vectorului pe un interval de timp finit t:
| | (6.6) |
Valoarea din partea dreaptă a acestei ecuații este numit impuls moment de forta. Ca rezultat, s-a obținut următoarea afirmație: creșterea momentului unghiular al unei particule pentru orice perioadă de timp este egală cu impulsul momentului de forță pentru același timp. Să luăm în considerare două exemple.
Exemplul 1. Momentul unghiular al unei particule în raport cu un punct se modifică cu timpul t conform legii ![]() unde și sunt niște vectori reciproc perpendiculari constanți. Aflați momentul forței care acționează asupra particulei când unghiul dintre vectori și este egal cu 45°.
unde și sunt niște vectori reciproc perpendiculari constanți. Aflați momentul forței care acționează asupra particulei când unghiul dintre vectori și este egal cu 45°.
Conform (6.5),  acestea. vector , coincide întotdeauna în direcție cu vectorul . Să descriem vectorii și un moment t (Fig. 6.6). Din această figură se poate observa că unghiul = 45° în momentul în care De aici și .
acestea. vector , coincide întotdeauna în direcție cu vectorul . Să descriem vectorii și un moment t (Fig. 6.6). Din această figură se poate observa că unghiul = 45° în momentul în care De aici și .
Exemplul 2. O piatră A de masa m a fost aruncată în unghi față de orizont cu o viteză inițială . Neglijând rezistența aerului, găsiți dependența de timp a momentului unghiular al pietrei în raport cu punctul de aruncare O (Fig. 6.7).
Pentru un interval de timp dt, momentul unghiular al pietrei raportat la punct
Oh, primiți o creștere ![]() . Deoarece
. Deoarece ![]() Acea
Acea ![]() Prin integrarea acestei expresii, ținând cont de faptul că în momentul de față
Prin integrarea acestei expresii, ținând cont de faptul că în momentul de față ![]() primim
primim ![]() . Aceasta arată că direcția vectorului rămâne neschimbată în timpul mișcării (vectorul este îndreptat dincolo de plan, Fig. 6.7.
. Aceasta arată că direcția vectorului rămâne neschimbată în timpul mișcării (vectorul este îndreptat dincolo de plan, Fig. 6.7.
Luați în considerare acum conceptele de moment unghiular și moment de forță în jurul axei. Să alegem o axă fixă arbitrară într-un cadru de referință inerțial. Fie, relativ la un punct O de pe axă, momentul unghiular al particulei A, iar momentul forței care acționează asupra particulei, .
Momentul unghiular relativ la axa z este proiecția pe această axă a vectorului, definită relativ la un punct arbitrar Despre această axă (Fig. 6.8). În mod similar, este introdus conceptul de moment al forței în jurul axei. Al lor
Să aflăm proprietățile acestor cantități. Proiectând (6.5) pe axa z, obținem
| (6.7) |
adică, derivata în timp a momentului unghiular al particulei în jurul axei z este egală cu momentul forței în jurul acestei axe. În special, dacă atunci . Cu alte cuvinte, dacă momentul de forță în jurul unei axe fixe z este egal cu zero, atunci momentul unghiular al particulei în jurul acestei axe rămâne constant. În acest caz, vectorul în sine se poate schimba.
Exemplu: Un corp mic de masă m, suspendat pe un fir, se mișcă uniform de-a lungul unui cerc orizontal (Fig. 6.9) sub acțiunea gravitației.Față de punctul O, momentul unghiular al corpului - vectorul - este în același plan cu axa z și filetul. Când un corp se mișcă, vectorul se rotește tot timpul sub acțiunea momentului de gravitație, adică se schimbă. Proiecția rămâne constantă, deoarece vectorul este perpendicular
Să găsim acum expresii analitice pentru și . Este ușor de observat că această problemă se reduce la găsirea proiecțiilor pe axa z a produselor vectoriale și .
Să folosim sistemul de coordonate cilindric, legând cu particula A (Fig. 6.10) vectorii unitari direcționați în direcția creșterii coordonatelor corespunzătoare. În acest sistem de coordonate, raza-vector și impulsul particulei sunt scrise după cum urmează:
unde sunt proiecţiile vectorului pe ortele corespunzătoare. Din algebra vectorială se știe că produsul vectorial poate fi reprezentat
determinant

Aceasta arată imediat că momentul unghiular al particulei în jurul axei z
unde este proiecția vitezei unghiulare cu care vectorul rază al particulei se rotește.
În mod similar (6.8), momentul forței în jurul axei z se mai scrie:
| (6.10) |
unde este proiecția vectorului forță pe ort
Rețineți că proiecțiile și nu depind cu adevărat de alegerea punctului O pe axa z, în raport cu care sunt definiți vectorii și. În plus, este clar că și sunt mărimi algebrice, semnele lor corespund semnelor proiecțiilor și .
Ecuația de bază a dinamicii mișcării de rotație a unui punct material - accelerație unghiulară punctele în timpul rotației sale în jurul unei axe fixe este proporțională cu cuplul și invers proporțională cu momentul de inerție.
M = E*J sau E=M/J
Comparând expresia obținută cu legea a doua a lui Newton cu legea translațională, vedem că momentul de inerție J este o măsură a inerției corpului în mișcare de rotație. Ca și masa, cantitatea este aditivă.
Moment de inerție inel subtire:

Moment de inerție
Pentru a calcula momentul de inerție, trebuie să împărțim mental corpul în elemente suficient de mici, ale căror puncte pot fi considerate ca fiind situate la aceeași distanță de axa de rotație, apoi să găsim produsul masei fiecărui element cu pătratul. a distanței sale față de axă și, în final, însumați toți produsele rezultate. Evident, aceasta este o sarcină foarte intensivă în muncă. Pentru numărare
momentele de inerție ale corpurilor de formă geometrică regulată, în unele cazuri, pot fi utilizate metodele de calcul integral.
Găsirea sumei finite a momentelor de inerție a elementelor corpului va fi înlocuită cu însumarea la infinit un numar mare momente de inerție calculate pentru elemente infinitezimale:
lim i = 1 ∞ ΣΔm i r i 2 = ∫r 2 dm. (la ∆m → 0).
Să calculăm momentul de inerție al unui disc omogen sau al unui cilindru solid cu o înălțime h despre axa sa de simetrie

Să împărțim discul în elemente sub formă de inele concentrice subțiri cu centre pe axa de simetrie. Inelele rezultate au un diametru interior rși externă r + dr, și înălțimea h. Deoarece dr<< r
, atunci putem presupune că distanța tuturor punctelor inelului față de axă este r.
Pentru fiecare inel individual, momentul de inerție
i = ΣΔmr 2 = r 2 ΣΔm,
Unde ΣΔm este masa întregului inel.
Volumul soneriei 2prhdr. Dacă densitatea materialului discului ρ
, apoi masa inelului
ρ2prhdr.
Momentul de inerție al inelului
i = 2πρhr 3dr.
I = 2πρh 0 R ∫r 3dr,
I = (1/2)πρhR 4.
Dar masa discului m = ρπhR 2, prin urmare,
I = (1/2)mR 2.
Prezentăm (fără calcul) momentele de inerție pentru unele corpuri de formă geometrică regulată, realizate din materiale omogene.

1. Momentul de inerție al unui inel subțire în jurul unei axe care trece prin centrul său perpendicular pe planul său (sau al unui cilindru gol cu pereți subțiri în jurul axei sale de simetrie):
I = mR 2.
2. Momentul de inerție al unui cilindru cu pereți groși în jurul axei de simetrie:
I = (1/2)m(R 1 2 − R 2 2)
Unde R1− interne şi R2− razele exterioare.
3.
Momentul de inerție al discului în jurul unei axe care coincide cu unul dintre diametrele sale:
I = (1/4)mR 2.
4. Momentul de inerție al unui cilindru solid în jurul unei axe perpendiculare pe generatrice și care trece prin mijlocul acesteia:
I \u003d m (R 2 / 4 + h 2 / 12)
Unde R− raza bazei cilindrului, h este înălțimea cilindrului.
5.
Momentul de inerție al unei tije subțiri în jurul unei axe care trece prin mijlocul acesteia:
I = (1/12) ml 2,
Unde l este lungimea tijei.
6.
Momentul de inerție al unei tije subțiri în jurul unei axe care trece printr-unul dintre capete:
I = (1/3) ml 2
7. Momentul de inerție al bilei în jurul unei axe care coincide cu unul dintre diametrele acesteia:
I = (2/5)mR 2.
Dacă se cunoaște momentul de inerție al unui corp în jurul unei axe care trece prin centrul său de masă, atunci momentul de inerție față de orice altă axă paralelă cu prima poate fi găsit pe baza așa-numitei teoreme Huygens-Steiner.
momentul de inerție al corpului eu faţă de orice axă este egală cu momentul de inerţie al corpului Este aproximativ o axă paralelă cu cea dată și care trece prin centrul de masă al corpului, plus masa corpului m ori pătratul distanței l intre axe:
I \u003d I c + ml 2.
Ca exemplu, calculăm momentul de inerție al unei bile cu rază R si greutate m suspendat pe un fir de lungime l, raportat la axa care trece prin punctul de suspensie DESPRE. Masa firului este mică în comparație cu masa mingii. Din momentul de inerție al mingii în jurul axei care trece prin centrul de masă Ic = (2/5)mR 2, și distanța
între axe ( l + R), apoi momentul de inerție în jurul axei care trece prin punctul de suspensie:
I = (2/5)mR2 + m(l + R)2.
Dimensiunea momentului de inerție:
[I] = [m] × = ML 2.
Autentifică-te sau înregistrează-te pentru a posta comentarii
În orice sistem de particule există un punct remarcabil CU- centru de masă, sau centrul de greutate, care are o serie de proprietăți interesante și importante. Centrul de masă este punctul de aplicare al vectorului de impuls al sistemului, deoarece vectorul oricărui impuls este un vector polar. Poziția punctului CU relativ la început DESPRE al unui cadru de referință dat este caracterizat de un vector rază definit prin următoarea formulă:
Trebuie remarcat faptul că centrul de masă al sistemului coincide cu centrul său de greutate. Adevărat, această afirmație este adevărată numai în cazul în care câmpul gravitațional din cadrul sistemului dat poate fi considerat omogen.
Să găsim viteza centrului de masă în cadrul de referință dat. Diferențiând (4.8) în funcție de timp, obținem
acestea. impulsul sistemului este egal cu produsul dintre masa sistemului și viteza centrului său de masă.
Obținem ecuația de mișcare a centrului de masă. Conceptul de centru de masă permite să se dea ecuației (4.4) o formă diferită, care de multe ori se dovedește a fi mai convenabilă. Pentru a face acest lucru, este suficient să înlocuiți (4.10) în (4.4) și să țineți cont de faptul că masa sistemului ca atare este o valoare constantă. Apoi primim
| , | (4.11) |
unde este rezultanta tuturor forțelor externe care acționează asupra sistemului. Asta e ecuația de mișcare a centrului de masă sisteme - una dintre cele mai importante ecuații ale mecanicii. Conform acestei ecuații, când orice sistem de particule se mișcă, centrul său de inerție se mișcă ca și cum întreaga masă a sistemului ar fi concentrată în acest punct și toate forțele externe i-ar fi aplicate acționând asupra sistemului. În acest caz, accelerația centrului de inerție este complet independentă de punctele de aplicare a forțelor externe.
Prin urmare, dacă centrul de masă al sistemului se mișcă uniform și rectiliniu, atunci aceasta înseamnă că impulsul său este conservatîn procesul de mișcare. Desigur, și invers este adevărat.
Ecuația (4.11). coincide ca formă cu ecuația de bază a dinamicii unui punct material și este generalizarea sa naturală la un sistem de particule: accelerația sistemului în ansamblu este proporțională cu rezultanta tuturor forțelor externe și invers proporțională cu masa totală a sistemul. Amintiți-vă că în cadrele de referință non-inerțiale rezultanta tuturor forțelor externe include atât forțele de interacțiune cu corpurile înconjurătoare, cât și forțele de inerție.
Luați în considerare o serie de exemple despre mișcarea centrului de masă al sistemului.
Exemplul 1. Să arătăm cum poți rezolva problema cu un bărbat pe plută (pag. 90) într-un alt mod, folosind conceptul de centru de masă.
Deoarece rezistența la apă este neglijabilă, rezultanta tuturor forțelor externe care acționează asupra sistemului om-plută este egală cu zero. Și aceasta înseamnă că poziția centrului de inerție al acestui sistem nu se va schimba în timpul mișcării unei persoane (și a unei plute), adică.
![]() .
.
unde și sunt vectori-rază care caracterizează pozițiile centrelor de masă ale unei persoane și ale unei plute față de un anumit punct de pe țărm. Din această egalitate găsim legătura dintre incrementele vectorilor și
![]()
Ținând cont de faptul că incrementele și reprezintă mișcarea persoanei și a plutei față de țărm, găsim mișcarea plutei:

Exemplul 2. O persoană sare dintr-un turn în apă. Mișcarea săritorului în cazul general are un caracter foarte complex. Cu toate acestea, dacă rezistența aerului este neglijabilă, atunci putem afirma imediat că centrul de inerție al săritorului se mișcă de-a lungul unei parabole, ca un punct material, asupra căruia este acționat o forță constantă unde este masa unei persoane.
Exemplul 3. Un lanț închis legat printr-un fir de capătul axei unei mașini centrifuge se rotește uniform în jurul unei axe verticale cu o viteză unghiulară (Fig. 4.4). În acest caz, firul formează un unghi cu
vertical. Cum se comportă centrul de inerție al lanțului?
În primul rând, este clar că, cu o rotație uniformă, centrul de inerție al lanțului nu se mișcă în direcția verticală. Aceasta înseamnă că componenta verticală a forței T a tensiunii firului compensează forța gravitațională (Fig. 4.4, în dreapta). Componenta orizontală a forței de întindere este constantă în valoare absolută și este întotdeauna îndreptată spre axa de rotație.
Rezultă că centrul de masă al lanțului - punctul C - se deplasează de-a lungul unui cerc orizontal, a cărui rază poate fi găsită cu ușurință folosind formula (4.11), scriind-o sub forma
![]()
unde este masa lanțului. În acest caz, punctul C este întotdeauna între axa de rotație și filet, așa cum se arată în Fig. 4.4.
În acele cazuri frecvent întâlnite, când suntem interesați doar de mișcarea relativă a particulelor dintr-un sistem și nu de mișcarea acestui sistem în ansamblu, este cel mai oportun să folosim un cadru de referință în care centrul de masă este la odihnă. Acest lucru face posibilă simplificarea semnificativă atât a analizei fenomenului, cât și a calculelor.
Un cadru de referință care este conectat rigid la centrul de masă al unui anumit sistem de particule și se mișcă translațional în raport cu sistemele inerțiale se numește sistem de centru de greutate sau, pe scurt, Sistemul C(denumirea sistemului este asociată cu prima literă a cuvântului centru în latină). O trăsătură distinctivă a acestui sistem este că impulsul total al sistemului de particule din acesta este egal cu zero - aceasta rezultă direct din formula (4.10). Cu alte cuvinte, orice sistem de particule în ansamblu se bazează în - Sistemul C.
Pentru un sistem închis de particule, acesta CU-sistemul este inerțial, pentru neînchis - în general neinerțial.
Să găsim legătura dintre valorile energiei mecanice a sistemului în KȘi CU sisteme de referință. Să începem cu energia cinetică a sistemului. Viteza particulelor în K-sistemul poate fi reprezentat ca o sumă de viteze, unde și este viteza acestei particule în CU-sistem și viteza centrului de masă în raport cu sistemul K-sisteme de referinţă, respectiv. Apoi poți scrie.