Расчет реакции опоры по принципу возможных перемещений. Возможных перемещений принцип Принцип возможных скоростей
Принцип возможных перемещений позволяет решать самые разнообразные задачи на равновесие механических систем - находить неизвестные активные силы, определять реакции связей, находить положения равновесия механической системы под действием приложенной системы сил. Проиллюстрируем это на конкретных примерах.
Пример 1. Найти величину силы Р, удерживающей тяжелые гладкие призмы с массами в состоянии равновесия. Угол скоса призм равен (рис. 73).
Решение. Воспользуемся принципом возможных перемещений. Сообщим системе возможное перемещение и вычислим возможную работу активных сил:
Возможная работа силы тяжести равна нулю, так как сила перпендикулярна вектору элементарного перемещения точки приложения силы. Подставляя сюда значение и приравнивая выражение нулю, получаем:
Так как , то равно нулю выражение в скобках:
![]()
Отсюда находим
![]()

Пример 2. Однородная балка АВ длиной и весом Р, нагруженная парой сил с заданным моментом М, закреплена как показано на рис. 74 и находится в покое. Определить реакцию стержня BD, если он составляет угол а с горизонтом.

Решение. Задача отличается от предыдущей тем, что здесь требуется найти реакцию идеальной связи. Но в уравнение работ выражающее принцип возможных перемещений, реакции идеальных связей не входят. В таких случаях принцип возможных перемещений следует применять совместно с принципом освобождаемости от связей.
Мысленно отбросим стержень BD, а его реакцию S будем считать неизвестной по величине активной силой. После этого сообщим системе возможное перемещение (при условии, что данная связь совершенно отсутствует). Это будет элементарный поворот балки АВ на угол вокруг оси шарнира А в ту или другую сторону (на рис. 74 - против часовой стрелки). Элементарные перемещения точек приложения активных сил и отнесенной к ним реакции S при этом равны:
Составляем уравнение работ

Приравнивая нулю выражение в скобках, отсюда находим
![]()
Пример 3. Однородный стержень ОА весом закреплен при помощи цилиндрического шарнира О и пружины АВ (рис. 75). Определить положения, в которых стержень может находиться в равновесии, если жесткость пружины равна к, натуральная длина пружины - и точка В находится на одной вертикали с точкой О.

Решение. К стержню ОА приложены две активные силы - собственный вес и упругая сила пружины где - угол, образуемый стержнем с вертикалью ОВ. Наложенные связи - идеальные (в данном случае имеется единственная связь - шарнир О).
Сообщим системе возможное перемещение - элементарный поворот стержня вокруг оси шарнира О на угол , вычислим возможную работу активных сил и приравняем ее нулю:
Подставляя сюда выражение для силы F и значения
после простых преобразований получаем следующее тригонометрическое уравнение для определения угла (р при равновесии стержня:
Уравнение определяет три значения для угла :
Следовательно, стержень имеет три положения равновесия. Так как два первых положения равновесия существуют, если выполняется условие . Равновесие при существует всегда.
В заключение заметим, что принцип возможных перемещений можно применять и к системам с неидеальными связями. Акцент на идеальность связей делается в формулировке принципа с одной единственной целью - показать, что уравнения равновесия механических систем можно составлять, не включая в них реакции идеальных связей, упрощая этим расчеты.
Для систем с неидеальными связями принцип возможных перемещений следует переформулировать так: для равновесия механической системы с удерживающими связями, среди которых имеются неидеальные связи, необходимо и достаточно, чтобы возможная работа активных сил и реакций неидеальных связей была равна нулю. Можно, однако, обойтись без переформулировки принципа, условно относя реакции неидеальных связей в число активных сил.
Вопросы для самопроверки
1. В чем основная особенность несвободной механической системы по сравнению со свободной?
2. Что называется возможным перемещением? Приведите примеры.
3. Как определяются вариации координат точек системы при ее возможном перемещении (укажите три способа)?
4. Как классифицируются связи по виду их уравнений? Приведите примеры связей удерживающих и не удерживающих, стационарных и нестационарных.
5. В каком случае связь называется идеальной? Неидеальной?
6. Приведите словесную формулировку и математическую запись принципа возможных перемещений.
7. Как формулируется принцип возможных перемещений для систем, содержащих неидеальные связи?
8. Перечислите основные типы задач, решаемые при помощи принципа возможных перемещений.
Упражнения
При помощи принципа возможных перемещений решить следующие задачи из сборника И.В. Мещерского 1981 г. издания: 46.1; 46.8; 46.17; 2.49; 4.53.

Устанавливающий общее условие равновесия механической системы . Согласно этому принципу, для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма виртуальных работ только активных сил на любом возможном перемещении системы была равна нулю (если система приведена в это положение с нулевыми скоростями).
Количество линейно независимых уравнений равновесия, которые можно составить для механической системы, исходя из принципа возможных перемещений, равно количеству степеней свободы этой механической системы.
Возможными перемещениями несвободной механической системы называются воображаемые бесконечно малые перемещения, допускаемые в данный момент наложенными на систему связями (при этом время, входящее явно в уравнения нестационарных связей, считается зафиксированным). Проекции возможных перемещений на декартовы координатные оси называются вариациями декартовых координат.
Виртуальными перемещениями называются бесконечно малые перемещения, допускаемые связями, при "замороженном времени". Т.е. они отличаются от возможных перемещений, только когда связи реономны (явно зависят от времени).
Если, например, на систему наложено голономных реономных связей:
То возможные перемещения - это те, которые удовлетворяют
А виртуальные :
Виртуальные перемещения, вообще говоря, не имеют отношения к процессу движения системы - они вводятся лишь для того, чтобы выявить существующие в системе соотношения сил и получить условия равновесия. Малость же перемещений нужна для того, чтобы можно было считать реакции идеальных связей неизменными.
Напишите отзыв о статье "Принцип возможных перемещений"
Литература
- Бухгольц Н. Н. Основной курс теоретической механики. Ч. 1. 10-е изд. - Спб.: Лань, 2009. - 480 с. - ISBN 978-5-8114-0926-6 .
- Тарг С. М. Краткий курс теоретической механики: Учебник для вузов. 18-е изд. - М .: Высшая школа, 2010. - 416 с. - ISBN 978-5-06-006193-2 .
- Маркеев А. П. Теоретическая механика: учебник для университетов. - Ижевск: НИЦ "Регулярная и хаотичная динамика", 2001. - 592 с. - ISBN 5-93972-088-9 .
Отрывок, характеризующий Принцип возможных перемещений
– Nous у voila, [В этом то и дело.] отчего же ты прежде ничего не сказала мне?– В мозаиковом портфеле, который он держит под подушкой. Теперь я знаю, – сказала княжна, не отвечая. – Да, ежели есть за мной грех, большой грех, то это ненависть к этой мерзавке, – почти прокричала княжна, совершенно изменившись. – И зачем она втирается сюда? Но я ей выскажу всё, всё. Придет время!
В то время как такие разговоры происходили в приемной и в княжниной комнатах, карета с Пьером (за которым было послано) и с Анной Михайловной (которая нашла нужным ехать с ним) въезжала во двор графа Безухого. Когда колеса кареты мягко зазвучали по соломе, настланной под окнами, Анна Михайловна, обратившись к своему спутнику с утешительными словами, убедилась в том, что он спит в углу кареты, и разбудила его. Очнувшись, Пьер за Анною Михайловной вышел из кареты и тут только подумал о том свидании с умирающим отцом, которое его ожидало. Он заметил, что они подъехали не к парадному, а к заднему подъезду. В то время как он сходил с подножки, два человека в мещанской одежде торопливо отбежали от подъезда в тень стены. Приостановившись, Пьер разглядел в тени дома с обеих сторон еще несколько таких же людей. Но ни Анна Михайловна, ни лакей, ни кучер, которые не могли не видеть этих людей, не обратили на них внимания. Стало быть, это так нужно, решил сам с собой Пьер и прошел за Анною Михайловной. Анна Михайловна поспешными шагами шла вверх по слабо освещенной узкой каменной лестнице, подзывая отстававшего за ней Пьера, который, хотя и не понимал, для чего ему надо было вообще итти к графу, и еще меньше, зачем ему надо было итти по задней лестнице, но, судя по уверенности и поспешности Анны Михайловны, решил про себя, что это было необходимо нужно. На половине лестницы чуть не сбили их с ног какие то люди с ведрами, которые, стуча сапогами, сбегали им навстречу. Люди эти прижались к стене, чтобы пропустить Пьера с Анной Михайловной, и не показали ни малейшего удивления при виде их.
– Здесь на половину княжен? – спросила Анна Михайловна одного из них…
– Здесь, – отвечал лакей смелым, громким голосом, как будто теперь всё уже было можно, – дверь налево, матушка.
– Может быть, граф не звал меня, – сказал Пьер в то время, как он вышел на площадку, – я пошел бы к себе.
Анна Михайловна остановилась, чтобы поровняться с Пьером.
– Ah, mon ami! – сказала она с тем же жестом, как утром с сыном, дотрогиваясь до его руки: – croyez, que je souffre autant, que vous, mais soyez homme. [Поверьте, я страдаю не меньше вас, но будьте мужчиной.]
– Право, я пойду? – спросил Пьер, ласково чрез очки глядя на Анну Михайловну.
Принцип возможных перемещений сформулирован для решения задач статики методами динамики.
Определения
Связями называются все тела, ограничивающие перемещение рассматриваемого тела.
Идеальными называются связи, работа реакций которых на любом возможном перемещении равна нулю.
Числом степеней свободы механической системы называется число таких независимых между собой параметров, с помощью которых однозначно определяется положение системы.
Например, шар, расположенный на плоскости имеет пять степеней свободы, а цилиндрический шарнир - одну степень свободы.
В общем случае механическая система может иметь бесконечное число степеней свободы.
Возможными перемещениями будем называть такие перемещения, которые, во-первых, допускаются наложенными связями, и, во-вторых, являются бесконечно малыми.
Кривошипно-ползунный механизм имеет одну степень свободы. В качестве возможных перемещений могут приниматься параметры - , x и др.
Для любой системы число независимых друг от друга возможных перемещений равно числу степеней свободы.
Пусть некоторая система находится в равновесии и связи, наложенные на эту систему, являются идеальными. Тогда для каждой точки системы можно записать уравнение
 ,
(102)
,
(102)
где
 - равнодействующая активных сил,
приложенных к материальной точке;
- равнодействующая активных сил,
приложенных к материальной точке;
 -
равнодействующая реакций связей.
-
равнодействующая реакций связей.
Умножим
(102)
скалярно на вектор возможного перемещения
точки

 ,
,
так
как связи идеальные, то всегда ,
останется сумма элементарных работ
активных сил, действующих на точку
,
останется сумма элементарных работ
активных сил, действующих на точку
 .
(103)
.
(103)
Уравнение (103) можно записать для всех материальных точек, суммируя которые получим
 .
(104)
.
(104)
Уравнение (104) выражает следующий принцип возможных перемещений.
Для равновесия системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении системы была равна нулю.
Число уравнений (104) равно числу степеней свободы данной системы, что является достоинством этого метода.
Общее уравнение динамики (принцип Даламбера-Лагранжа)
Принцип возможных перемещений позволяет решать задачи статики методами динамики, с драгой стороны, принцип Даламбера дает общий метод решения задач динамики методами статики. Объединяя два эти принципа можно получить общий метод решения задач механики, который называется принципом Даламбера-Лагранжа.
 .
(105)
.
(105)
При движении системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равно нулю.
В аналитической форме уравнение (105) имеет вид
Уравнения Лагранжа II рода
Обобщенными координатами (q ) называются такие независимые друг от друга параметры, которые однозначно определяют поведение механической системы.
Число обобщенных координат всегда равно числу степеней свободы механической системы.
В качестве обобщенных координат могут быть выбраны любые параметры, имеющие любую размерность.
Н апример,
при изучении движения математического
маятника, имеющего одну степень свободы,
в качестве обобщенной координатыq
могут быть приняты параметры:
апример,
при изучении движения математического
маятника, имеющего одну степень свободы,
в качестве обобщенной координатыq
могут быть приняты параметры:
x (м), y (м) – координаты точки;
s (м) – длина дуги;
(м 2) – площадь сектора;
(рад) – угол поворота.
При движении системы ее обобщенные координаты будут с течением времени непрерывно изменяться
Уравнения (107) – это уравнения движения системы в обобщенных координатах.
Производные от обобщенных координат по времени называются обобщенными скоростями системы
 .
(108)
.
(108)
Размерность обобщенной скорости зависит от размерности обобщенной координаты.
Через обобщенные координаты могут быть выражены любые другие координаты (декартовы, полярные и др.).
Наряду с понятием обобщенной координаты вводится понятие обобщенной силы.
Под обобщенной силой понимают величину равную отношению суммы элементарных работ всех сил, действующих на систему на некотором элементарном приращении обобщенной координаты, к этому приращению
 ,
(109)
,
(109)
где S – индекс обобщенной координаты.
Размерность обобщенной силы зависит от размерности обобщенной координаты.
Для нахождения уравнений движения (107) механической системы с геометрическими связями в обобщенных координатах используются дифференциальные уравнения в форме Лагранжа II рода
 .
(110)
.
(110)
В
(110)
кинетическая энергия T
системы выражена через обобщенные
координаты q
S
и обобщенные скорости
 .
.
Уравнения Лагранжа дают единый и достаточно простой метод решения задач динамики. Вид и число уравнений не зависит от количества тел (точек), входящих в систему, а только от числа степеней свободы. При идеальных связях эти уравнения позволяют исключить все заранее неизвестные реакции связей.
Как известно из курса теоретической механики, условие равновесия объекта может иметь силовую или энергетическую формулировку. Первый вариант представляет собой условие равенства нулю главного вектора и главного момента всех сил и реакций, действующих на тело. Второй подход (вариационный), называемый принципом возможных перемещений, оказался весьма полезен для решения ряда задач строительной механики.
Для системы абсолютно жесткихтел принцип возможных перемещений формулируется так: если система абсолютно жестких тел находится в равновесии, то сумма работ всех внешних сил на любом возможном бесконечно малом перемещении равна нулю. Возможным (или виртуальным) называют перемещение, которое не нарушает кинематические связи и сплошность тел. Для системы на рис. 3.1 возможным является только поворот стержня относительно опоры. При повороте на произвольный малый угол силы и совершают работу  Согласно принципу возможных перемещений, если система находится в равновесии, то должно быть
Согласно принципу возможных перемещений, если система находится в равновесии, то должно быть  . Подставляя сюда геометрические соотношения
. Подставляя сюда геометрические соотношения  получим условие равновесия в силовой формулировке
получим условие равновесия в силовой формулировке
Принцип возможных перемещений для упругихтел формулируется следующим образом: если система упругих тел находится в равновесии, то сумма работ всех внешних и внутренних сил на любом возможном бесконечно малом перемещении равна нулю. В основе этого принципа лежит понятие о полной энергии упругой деформированной системы П. Если нагружение конструкции происходит статически, то эта энергия равна работе, совершаемой внешними Uи внутренними Wсилами при переводе системы из деформированного состояния в исходное:
При указанном переводе внешние силы не меняют своего значения и совершают отрицательную работу U= -F . Внутренние силы при этом уменьшаются до нуля и совершают положительную работу, так как это силы сцепления частиц материала и направлены в сторону, противоположную внешней нагрузки:
где  - удельная потенциальная энергия упругой деформации; V - объем тела. Для линейной системы , где . Согласно теореме Лагранжа-Дирихле состоянию устойчивого равновесия соответствует минимум полной потенциальной энергии упругой системы, т. е.
- удельная потенциальная энергия упругой деформации; V - объем тела. Для линейной системы , где . Согласно теореме Лагранжа-Дирихле состоянию устойчивого равновесия соответствует минимум полной потенциальной энергии упругой системы, т. е.
Последнее равенство полностью соответствует формулировке принципа возможных перемещений. Приращения энергий dUи dWмогут быть вычислены на любых возможных перемещениях (отклонениях) упругой системы от состояния равновесия. Для расчета конструкций, удовлетворяющих требованиям линейности, бесконечно малое возможное перемещение d можно заменить весьма малым конечным перемещением , в качестве которого может быть выбрано любое деформированное состояние конструкции, созданное произвольно выбранной системой сил. С учетом этого полученное условие равновесия следует записать как
Работа внешних сил
Рассмотрим методику вычисления работы внешних сил на действительном и возможном перемещении. Стержневая система загружена силами и (рис. 3.2, а), которые действуют одновременно, и в любой момент времени отношение остается постоянным. Если считать обобщенной силой, то по значению в любой момент времени можно вычислить все остальные нагрузки (в данном случае ). Штриховой линией показано действительное упругое перемещение, возникающее от этих сил. Обозначим это состояние индексом 1. Перемещение точек приложения сил и в направлении этих сил в состоянии 1 обозначим и .
В процессе нагружения линейной системы силами и растут силы и пропорционально им растут перемещения и (рис. 3.2, в). Действительная работа сил и на создаваемых ими перемещениях равна сумме площадей графиков , т. е.  . Записав это выражение как
. Записав это выражение как  , получим произведение обобщенной силы на обобщенное перемещение . В этой форме можно представит
, получим произведение обобщенной силы на обобщенное перемещение . В этой форме можно представит
работу сил при любом нагружении, если все нагрузки изменяются синхронно, т. е. отношение их значений остается постоянным.
Далее рассмотрим работу внешних сил на возможном перемещении. В качестве возможного перемещения примем, например, деформированное состояние системы, возникающее в результате приложения в некоторой точке силы (рис. 3.2, б). Это состояние, соответствующее дополнительному перемещению точек приложения сил и на расстояние и , обозначим 2. Силы и , не меняя своего значения, совершают виртуальную работу на перемещениях и (Рис. 3.2, в):

Как видно, в обозначении перемещения первый индекс показывает состояние, в котором заданы точки и направления этих перемещений. Второй индекс показывает состояние, в котором действуют силы, вызывающие это перемещение.
Работа единичной силы F 2 на действительном перемещении
Если же рассматривать состояние 1 в качестве возможного перемещения для силы F 2 ,то ее виртуальная работа на перемещении
Работа внутренних сил
Найдем работу внутренних сил состояния 1, т. е. от сил и , на виртуальных перемещениях состояния 2, т. е. возникших в результате приложения нагрузки F 2 . Для этого выделим элемент стержня длиной dx(рис. 3.2 и 3.3, а). Поскольку рассматриваемая система плоская, то в сечениях элемента действуют только две силы Sи Q z и изгибающий момент Му Эти усилия для вырезанного элемента являются внешними. Внутренние усилия - это усилия сцепления, обеспечивающие прочность материала. Они равны внешним по значению, но направлены в сторону, противоположную деформации, поэтому их работа при нагружении отрицательна (рис. 3.3, б-г, показаны серым цветом). Последовательно вычислим работу, совершаемую каждым силовым фактором.
Работа продольных сил на перемещении , которое создают силы S 2 , возникшие в результате приложения нагрузки F 2 (рис. 3.2, б, 3.3, б),
![]()
Удлинение стержня длиной dxнайдем по известной формуле
где A - площадь сечения стержня. Подставив это выражение в предыдущую формулу, находим

Аналогичным образом определим работу, которую совершает изгибающий момент на угловом перемещении ,создаваемом моментом (рис. 3.3, в):

Угол поворота найдем как
где J- момент инерции сечения стержня относительно оси у. После подстановки получим

Найдем работу поперечной силы на перемещении (рис. 3.3, г). Касательные напряжения и сдвиги от перерезывающей силы Q z распределены по сечению стержня не линейно (в отличие от нормальных напряжений и удлинений в предыдущих случаях нагружения). Поэтому для определения работы сдвига приходится рассматривать работу, совершаемую касательными напряжениями в слоях стержня.
Касательные напряжения от силы Q z , которые действуют в слое, лежащем на расстоянии zот нейтральной оси (рис. 3.3, д), вычисляются по формуле Журавского
где Су - статический момент части площади сечения, лежащей выше этого слоя, взятый относительно оси у; b- ширина сечения на уровне рассматриваемого слоя. Эти напряжения создают сдвиг слоя на угол, который согласно закону Гука определяется как  - модуль сдвига. В результате этого торец слоя смещается на
- модуль сдвига. В результате этого торец слоя смещается на

Суммарная работа касательных напряжений первого состояния , действующих на торце этого слоя, на перемещениях второго состояния вычисляется путем интегрирования произведения поплощади сечения
После подстановки сюда выражений для и получим

Вынесем из под интеграла величины, не зависящие от z, умножим и разделим это выражение наА, получим

Здесь введен безразмерный коэффициент ,
зависящий только от конфигурации и соотношения размеров сечений. Для прямоугольника = 1,2, для двутавровых и коробчатых сечений (А с - площадь сечения стенки или в коробчатом сечении - двух стенок).
Поскольку работа каждого из рассмотренных компонентов нагружения (S, Q, М) на перемещениях, вызываемых другими компонентами, равна нулю, то суммарная работа всех внутренних сил для рассмотренного элемента стержня длиной dx

| (3.3) |

В сечении элемента пространственной стержневой системы действуют шесть внутренних усилий (S, Q, Q z , М х, Му, М 2), поэтому для нее выражение суммарной работы внутренних сил будет иметь вид,


Здесь M x - крутящий момент в стержне; J T - момент инерции стержня при свободном кручении (геометрическая жесткость на кручение). В подынтегральном выражении опущены индексы «и».
В формулах (3.3) и (3.4) S v Q yV Q zl , М х1 , М у1 , М г1 обозначают аналитические выражения эпюр внутренних усилий от действия сил F{и F{,aS 2 , Q y 2 , Q z 2 , М х2 , М у2 , М г2 - описания эпюр внутренних усилий от силы F 2 .
Теоремы об упругих системах
Структура формул (3.3) и (3.4) показывает, что они «симметричны» относительно состояний 1 и 2, т. е. работа внутренних сил состояния 1 на перемещениях состояния 2 равна работе внутренних сил состояния 2 на перемещениях состояния 1 Но согласно (3.2) 
Следовательно, если равны работы внутренних сил, то равны и работы внешних сил -Это утверждение носит название теоремы о взаимности работ (теорема Бетти, 1872 г.).
Для стержневой системы, загруженной силой F 1 (рис. 3.4, а), возьмем в качестве возможного перемещения деформированное состояние, возникшее при загружении ее силой F 2 (рис. 3.4, б). Для этой системы согласно теореме Бетти 1- Если же положить , то получим
| (3.5) |
Эта формула выражает теорему Максвелла (1864 г.) о взаимности перемещений: перемещение точки приложения первой единичной силы по ее направлению, вызванное действием второй единичной силы, равно перемещению точки приложения второй единичной силы по своему направлению, вызванному действием первой единичной силы. Эту теорему можно применить и к системе на рис. 3.2. Если задать = 1 Н (п. 3.1.2), то получим равенство обобщенных перемещений  .
.
Рассмотрим статически неопределимую систему с опорами, которым можно задавать требуемое перемещение, принимаемое как возможное (рис. 3.4, в, г). В первом состоянии сместим опору 1 на а во втором - зададим поворот заделки на угол - При этом возникнут реакции в первом состоянии и , а во втором - i . Согласно теореме о взаимности работ, запишем Если задать  (здесь размерность = м, а величина - безразмерная), то получим
(здесь размерность = м, а величина - безразмерная), то получим
Это равенство численное, так как размерность реакции = Н, a = Н-м. Таким образом, реакция R 12 в неподвижной связи 1, возникающая при перемещении связи 2 на единицу, численно равна реакции , возникающей в связи 2 при единичном смещении связи 1. Это утверждение называется теоремой о взаимности реакций.
Теоремы, изложенные в данном разделе, используются для аналитического расчета статически неопределимых систем.
Определение перемещений
Общая формула перемещений
Для вычисления перемещений, возникающих в стержневой системе под действием заданной нагрузки (состояние 1), следует сформировать вспомогательное состояние системы, в котором действует одно единичное усилие, совершающее работу на искомом перемещении (состояние 2). Это значит, что при определении линейного перемещения необходимо задать единичную силу F 2 = 1 Н, приложенную в той же точке и в том же направлении, в котором надо определить перемещение. Если требуется определить угол поворота какого-либо сечения, то в этом сечении прикладывается единичный момент F 2 = 1 Н м. После этого составляется уравнение энергий (3.2), в котором состояние 2 принимается за основное, а деформированное
 |
состояние 1 рассматривается как виртуальное перемещение. Из этого уравнения и вычисляется искомое перемещение.
Найдем горизонтальное перемещение точкиВ для системы на рис. 3.5, а. Для того чтобы в уравнение работ (3.2) попало искомое перемещение Д 21 , возьмем в качестве основного состояния перемещение системы под действием единичной силы F 2 - 1 Н (состояние 2, рис. 3.5, б). Возможным перемещением будем считать действительное деформированное состояние конструкции (рис. 3.5, а).
Работу внешних сил состояния 2 на перемещениях состояния 1 найдем как Согласно (3.2),

следовательно, искомое перемещение

Поскольку (п. 3.1.4), работа внутренних сил состояния 2 на перемещениях состояния 1 вычисляется по формуле (3.3) или (3.4). Подставив в (3.7) выражение (3.3) дляработы внутренних сил плоской стержневой системы, найдем
Для дальнейшего использования этого выражения целесообразно ввести понятие единичных эпюр внутренних силовых факторов, т.е. из которых первые две безразмерные, а размерность . В результате получится
В эти интегралы следует подставить выражения для эпюр распределениясоответствующих внутренних усилий от действующей нагрузки и и от силы F 2 = 1. Полученное выражение называют формулой Мора (1881 г.).
При расчете пространственных стержневых систем для вычисления суммарной работы внутренних сил следует использовать формулу (3.4), тогда получится


Вполне очевидно, что в интегралы подставляются выражения для эпюр внутренних усилий S, Q y , Q z , М х, М у, М г и значения геометрических характеристик сечений A, J т, Jу,J, для соответствующего n-го участка. Для сокращения записи в обозначениях этих величин индекс «и» опущен.
3.2.2. Частные случаи определения перемещений
Формула (3.8) используется в общем случае плоской стержневой системы, однако в ряде случаев ее можно существенно упростить. Рассмотрим частные случаи ее реализации.
1. Если деформациями от продольных сил можно пренебречь, что характерно для балочных систем, то формула(3.8) будет записана как
2. Если плоская система состоит только из изгибаемых тонкостенных балок с отношением l/h> 5 для консолей или l/h> 10 для пролетов (I и h- длина балки и высота сечения), то, как правило, энергия деформаций изгиба существенно превышает энергию деформаций от продольных и поперечных сил, поэтому их можно не учитывать в расчете перемещений. Тогда формула (3.8) примет вид
![]()
3. Для ферм, стержни которых при узловом нагружении испытывают в основном продольные усилия, можно считать М = 0 и Q= 0. Тогда перемещение узла вычисляется по формуле
![]()
Интегрирование производится по длине каждого стержня, а суммирование - по всем стержням. Имея в виду, что усилие S u в и-м стержне и площадь сечения не изменяются по его длине, можем упростить данное выражение:
![]()
При всей видимой простоте этой формулы аналитический расчет перемещений в фермах весьма трудоемок, так как требует определения усилий во всех стержнях фермы от действующей нагрузки () и от единичной силы (), приложенной в точке, перемещение которой необходимо найти.
3.2.3. Методика и примеры определения перемещений
Рассмотрим вычисление интеграла Мора методом А. Н. Верещагина (1925 г.). Интеграл Мора имеет вид (3.8), где в качестве D 1 , D 2 могут фигурировать эпюры изгибающих моментов, продольных или поперечных сил. Как минимум одна из эпюр () в подынтегральном выражении линейная или кусочно-линейная, так как построена от единичной нагрузки. Поэтому для
 |
Первый изинтегралов численно равен площади подграфиком (на рис. 3.6 заштрихована), а второй - статическому моменту этой площади относительно оси . Статический момент может быть записан как , где - координата положения центра тяжести площади (точка А). С учетом сказанного получим
 (3.13)
(3.13)
Правило Верещагина формулируется следующим образом: если на участке хотя бы одна из эпюр линейна, то интеграл Мора вычисляется как произведение площади произволь
При расчете конструкций в среде Mathcadнет необходимости пользоваться правилом Верещагина, так как можно вычислять интеграл путем численного интегрирования.
Пример 3.1 (рис. 3.7, а). Балка загружена двумя симметрично расположенными силами . Найти перемещения точек приложения сил .
1. Построим эпюру изгибающих моментов М 1 от сил F 1 . Опорные реакции  Максимальный изгибающий момент под силой
Максимальный изгибающий момент под силой
![]()
2. Поскольку система симметрична, то прогибы под силами будут одинаковы. В качестве вспомогательного состояния возьмем загружение балки двумя единичными силами F 2 = 1 Н, приложенными в тех же точках, что и силы F 1
(рис. 3.7, б). Эпюра изгибающих моментов для данного нагружения аналогична предыдущей, и максимальный изгибающий момент М 2тах =0,5(L-b).
3. Нагружение системы двумя силами второго состояния характеризуется обобщенной силой F 2 и обобщенным перемещением , которые создают работу внешних сил на перемещении состояния 1, равную ![]() . Вычислим перемещение по формуле (3.11). Перемножая эпюры по участкам по правилу Верещагина, найдем
. Вычислим перемещение по формуле (3.11). Перемножая эпюры по участкам по правилу Верещагина, найдем
После подстановки значений ![]() получим
получим
![]()
Пример 3.2. Найти горизонтальное перемещение подвижной опоры П-образной рамы, загруженной силой F x (рис. 3.8, а).
1. Построим эпюру изгибающих моментов от силы F 1 Опорные реакции  . Максимальный изгибающий момент под силой F 1
. Максимальный изгибающий момент под силой F 1
![]()
2. В качестве вспомогательного состояния возьмем загружение балки единичной горизонтальной силой F 2 , приложенной в точкеВ (рис. 3.8, б). Строим эпюру изгибающих моментов для этого случая нагружения. Опорные реакции А 2у = В 2у = 0, А 2х = 1. Максимальный изгибающий момент .
3. Вычисляем перемещение по формуле (3.11). На вертикальных участках произведение равно нулю. На горизонтальном участке эпюра М 1 не линейна, а эпюра линейна. Перемножая эпюры методом Верещагина, получим

Произведение отрицательно, так как эпюры лежат по разные стороны. Полученное отрицательное значение перемещения свидетельствует о том, что фактическое его направление противоположно направлению единичной силы.
Пример 3.3 (рис. 3.9). Найти угол поворота сечения двухопорной балки под силой и найти положение силы, при котором этот угол будет максимальным.
1. Построим эпюру изгибающих моментов М 1 от силы F 1 .Для этого найдем опорную реакцию А 1 . Из уравнения равновесия для системы в целом  найдем .Максимальный изгибающий момент под силой Fj
найдем .Максимальный изгибающий момент под силой Fj
![]()
2. В качестве вспомогательного состояния возьмем загружение балки единичным моментом F 2 = 1 Н-м в том сечении, поворот которого надо определить (рис. 3.9, б). Строим эпюру изгибающих моментов для этого случая нагружения. Опорные реакции А 2 = -В 2 = 1/L,изгибающие моменты

Оба момента отрицательные, так как направлены по часовой стрелке. Эпюры строятся на растянутом волокне.
3. Вычисляем угол поворота по формуле (3.11), выполняя перемножение по двум участкам,

Обозначив , можно получить это выражение в более удобной форме:

График зависимости угла поворота от положения силы F 1 показан на рис. 3.9, в. Продифференцировав это выражение, из условия найдем положение силы, при котором угол наклона балки под ней будет наибольшим по абсолютному значению. Это произойдет при значениях равных 0,21 и 0,79.
1. Обобщённые координаты и число степеней свободы.
При движении механической системы, все её точки не могут перемещаться произвольно, так как они ограничены связями. Это значит, что не все координаты точек независимы. Положение точек определяется заданием только независимых координат.
обобщёнными координатами. Для голономных систем (т.е. таких, связи которых выражаются уравнениями, зависящими только от координат) число независимых обобщённых координат механической системыравно числу степеней свободы этой системы.
Примеры:
Положение всех точек однозначно определяется углом поворота
кривошипа.
Одна степень свободы.
2. Положение свободной точки в пространстве определяется тремя координатами, независимыми друг от друга. Поэтому три степени свободы.
3. Твёрдое вращающееся тело, положение определяется углом поворота j. Одна степень свободы.
4. Свободное твёрдое тело, движение которого определяется шестью уравнениями - шесть степеней свободы.
2. Возможные перемещения механической системы.
Идеальные связи.
Возможными перемещениями называются воображаемые бесконечно малые перемещения, допускаемые в данный момент наложенными на систему связями. Возможные перемещения точек механической системы рассматриваются как величины первого порядка малости, поэтому криволинейные перемещения точек заменяют прямолинейными отрезками, отложенными по касательной к траекториям движения точек и обозначаются dS .

dS A = dj . OA
Все силы, действующие на материальную точку, делятся на задаваемые и реакции связей.
Если сумма работ реакций связей на любом возможном перемещении системы равна нулю, то такие связи называются идеальными.
![]()
3. Принцип возможных перемещений.
Для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на неё активных сил при любом возможном перемещении системы была равна нулю.
![]()
Значение принципа возможных перемещений:
1. Учитываются только активные силы.
2. Даёт в общей форме условие равновесия для любой механической системы, тогда, как в статике необходимо рассматривать равновесие каждого тела системы в отдельности.
Задача.

Для заданного положения кривошипно-ползунного механизма при равновесии, найти зависимость между моментом и силой, если ОА = ℓ .
![]()
![]()
Общее уравнение динамики.
Принцип возможных перемещений даёт общий метод решения задач статики. С другой стороны, принцип Даламбера позволяет использовать методы статики для решения задач динамики. Следовательно, применяя эти два принципа одновременно, можно получить общий метод решения задач динамики.
Рассмотрим механическую систему, на которую наложены идеальные связи. Если ко всем точкам системы, кроме действующих на них активных сил и реакций связей , прибавить соответствующие силы инерции , то согласно принципу Даламбера полученная система сил будет находиться в равновесии. Применяя принцип возможных перемещений, получим:
Так как связи идеальные, то:
![]()
![]()
Это равенство представляет общее уравнение динамики.
Из него вытекает принцип Даламбера-Лагранжа – при движении системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю.
Задача.

В подъёмнике к шестерне 2 веса 2G c радиусом R 2 =R приложен вращающий момент М=4GR .
Определить ускорение поднимаемого груза А весом G , пренебрегая весом верёвки и трением в осях. Барабан, на который наматывается верёвка, и жёстко скреплённая с ним шестерня 1 , имеют общий вес 4G и радиус инерции r = R . Радиус барабана R A = R и шестерни 1
R 1 =0,5R .
Изобразим все действующие силы, направление ускорений и возможные перемещения.

________________
![]()


Подставим в общее уравнение динамики
Выразим перемещение через угол поворота δφ 1
![]()
Подставим значения
δφ 1 ≠0
Выразим все ускорения через искомое а А и приравняем выражение в скобках к нулю

![]()
Подставим значения



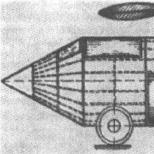
Принцип возможных перемещений.
 а = 0,15 м
а = 0,15 м
b = 2а = 0,3 м
m = 1,2 Нм _________________
х В; у В; N A ; M p
Решение: Найдём реакцию подвижной опоры А для чего мысленно отбросим эту связь, заменив её действие реакцией N A

Возможным перемещением стержня АС является его поворот вокруг шарнира С на угол dj . Стержень ВС остаётся неподвижным.
Составим уравнение работ, учитывая, что работа сил при повороте тела равна произведению момента силы относительно центра вращения на угол поворота тела.
Для определения реакций жёсткого закрепления в опоре В сначала найдём момент реакции М р . Для этого отбросим связь, препятствующую повороту стержня ВС , заменив жёсткое закрепление шарнирно-неподвижной опорой и приложив момент М р .

Сообщим стержню возможный поворот на угол dj 1 .
Составим уравнение работ для стержня ВС :
Определим перемещения:
![]()

Для определения вертикальной составляющей реакции жёского закрепления отбросим связь, препятствующую вертикальному перемещению точки В , заменив жёсткое закрепление скользящей (невозможен поворот) и приложив реакцию :

Сообщим левой части (стержню ВС с ползуном В ) возможную скорость V B поступательного движения вниз. Стержень АС повернётся вокруг точки А.
Составим уравнение работ:
![]()


Для определения горизонтальной составляющей реакции жёсткого закрепления отбросим связь, препятствующую горизонтальному перемещению точки В заменив жёсткую заделку скользящей и приложив реакцию :
Сообщим левой части (ползуну В вместе со стержнем ВС ) возможную скорость V B поступательного движения влево. Так как опора А на катках, то и правая часть будет перемещаться поступательно с той же скоростью. Следовательно .
Составим уравнение работ для всей конструкции.
Для проверки правильности решения составим уравнения равновесия всей системы:
Условие выполнено.
Ответ: y B = -14,2 H; X B = -28,4 H; N A = 14,2 H; V P =3,33 Hм.
Обобщённые скорости. Обобщённые силы.
Независимые величины, однозначно определяющие положение всех точек механической системы, называются обобщёнными координатами. – q
Если система имеет S степеней свободы, то её положение будет определяться S обобщёнными координатами:
q 1 ; q 2 ; …; q s .
Поскольку обобщённые координаты между собой независимы, то элементарные приращения этих координат будут также независимы:
dq 1 ; dq 2 ; …; dq S .
При этом каждая из величин dq 1 ; dq 2 ; …; dq S определяет соответствующее, независимое от других возможное перемещение системы.
При движении системы её обобщённые координаты будут с течением времени непрерывно изменяться, закон этого движения определяется уравнениями:
, …. ,
Это уравнения движения системы в обощённых координатах.
Производные от обобщённых координат по времени называются обобщёнными скоростями системы:
Размерность зависит от размерности q .
Рассмотрим механическую систему, состоящую из n материальных точек, на которые действуют силы F 1 , F 2 , F n . Пусть система имеет S степеней свободы и её положение определяется обобщёнными координатами q 1 ; q 2 ; q 3 . Сообщим системе возможное перемещение, при котором координата q 1 получает приращение dq 1 , а остальные координаты не изменяются. Тогда радиус-вектор к-той точки получает элементарное приращение (dr k) 1 . Это приращение, которое получает радиус-вектор при изменении только координаты q 1 на величину dq 1 . Остальные координаты остаются неизменными. Поэтому (dr k) 1 вычисляется как частный дифференциал:

Вычислим элементарную работу всех приложенных сил:

Вынесем за скобки dq 1 , получим:

где - обобщённая сила.
Итак, обобщённая сила – это коэффициент при приращениях обобщённой координаты.
Вычисление обобщённых сил сводится к вычислению возможной элементарной работы.
Если меняются все q , то:
Согласно принципа возможных перемещений, для равновесия системы необходимо и достаточно, чтобы SdА а к = 0 . В обобщённых координатах Q 1 . dq 1 + Q 2 . dq 2 + … + Q s . dq s = 0 следовательно, для равновесия системы необходимо и достаточно, чтобы обобщённые силы, соответствующие выбранным для системы возможным перемещениям, а значит и обобщённым координатам, были равны нулю.
Q 1 = 0; Q 2 = 0; … Q s = 0.
Уравнения Лагранжа.
Используя общее уравнение динамики для механической системы, можно найти уравнения движения механической системы.
4) определить кинетическую энергию системы, выразить эту энергию через обобщённые скорости и обобщённые координаты;
5) найти соответствующие частные производные от Т по и и подставить все значения в уравнение.
Теория удара.
Движение тела под действием обычных сил характеризуется непрерывным изменением модулей и направлений скоростей этого тела. Однако встречаются случаи, когда скорости точек тела, а следовательно и количество движения твёрдого тела за очень маленький промежуток времени получают конечные изменения.
Явление, при котором за ничтожно малый промежуток времени скорости точек тела изменяются на конечную величину, называется ударом.
Силы, при действии которых происходит удар, называются ударными.
Малый промежуток времени t , в течение которого происходит удар, называется временем удара.
Так как ударные силы очень велики и за время удара изменяются в значительных пределах, то в теории удара в качестве меры взаимодействия тел рассматривают не сами ударные силы, а их импульсы.
Импульсы неударных сил за время t будут величинами очень малыми и ими можно пренебречь.
Теорема об изменении количества движения точки при ударе:
где v – скорость точки в начале удара,
u – скорость точки в конце удара.
Основное уравнение теории удара.

Перемещение точек за очень малый промежуток времени, то есть за время удара, будут также малы, а следовательно, будем считать тело неподвижным.
Итак, можно сделать следующие выводы о действии ударных сил:
1) действием неударных сил за время удара можно пренебречь;
2) перемещениями точек тела за время удара можно пренебречь и считать тело во время удара неподвижным;